

Modular bionic quadruped robot
A quadruped robot, modular technology, used in manipulators, motor vehicles, program-controlled manipulators, etc., can solve the limitations of movement flexibility, stability, free movement trajectory and turning ability, and imperfect robot movement behavior and mechanical mechanism , limit the overall performance of the robot and other issues, to achieve the effect of easy mass manufacturing, overcoming poor motion flexibility and stability, and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0046] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
[0047] The invention discloses a modular bionic quadruped robot, which comprises first to fourth leg joints and N trunk joints, where N is a natural number greater than or equal to 1.
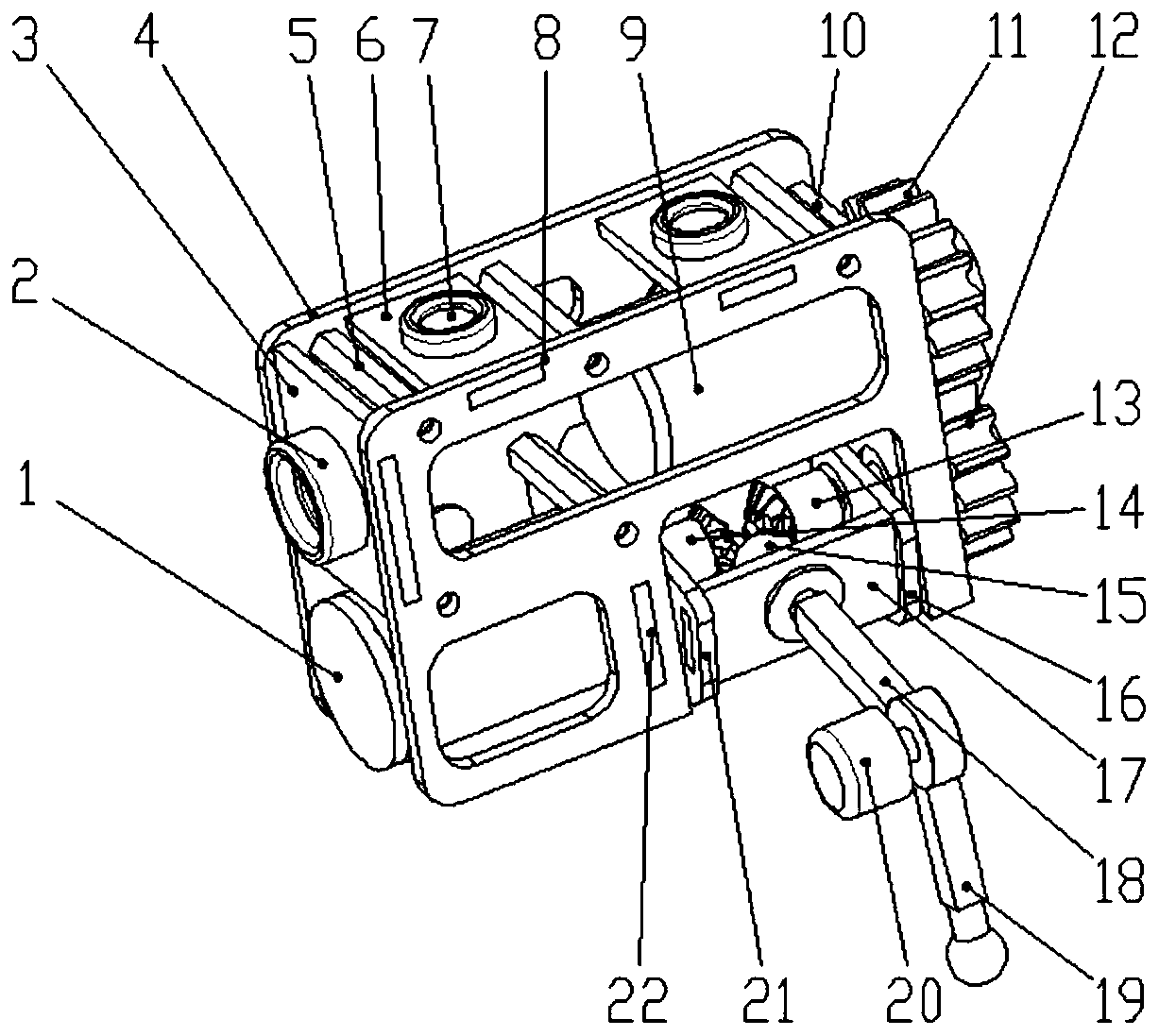
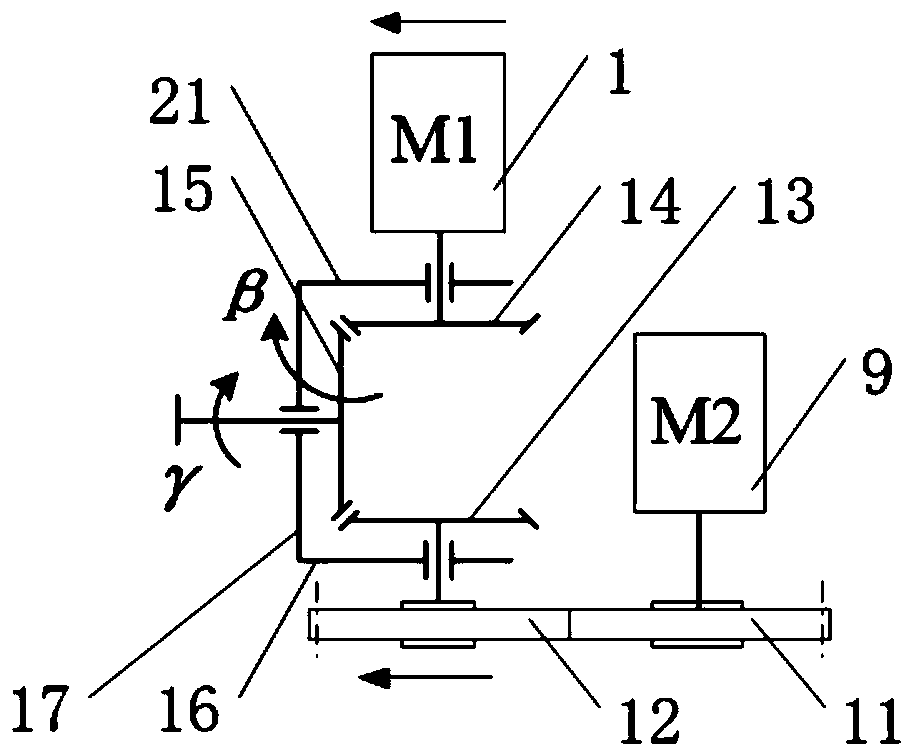
[0048] Such as figure 1 As shown, the first to fourth leg joints all include brackets, first to third drive motors, first to second transmission gears, first to third bevel transmission gears, swivel frame, proximal drive legs, the distal drive leg, and the first to third leg connection mechanisms;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More