

A Method for Determining Error Coefficients of Inertial Devices
An inertial device and error coefficient technology, which is applied in the field of inertial device error coefficient determination, can solve problems such as estimation deviation, and achieve the effects of small storage, good application range and engineering value, and high-precision estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
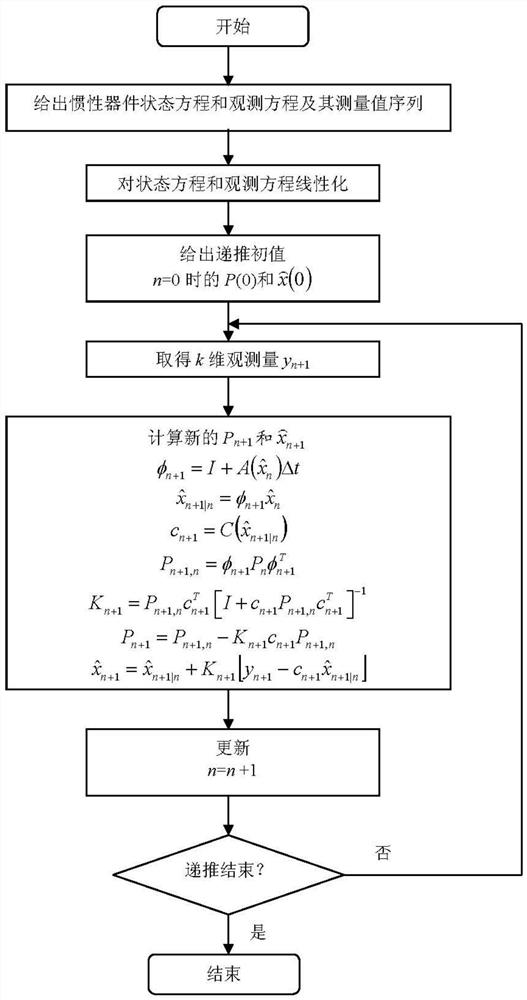
[0055] A method for determining an error coefficient of an inertial device, the inertial device including but not limited to an accelerometer or a gyroscope or an integrated navigation system; comprising the following steps:
[0056] S1, with inertial device error coefficient as state variable, establish state equation and observation equation; The state equation and observation equation of described inertial device error coefficient are:
[0057]
[0058] In the formula, t is time, x(t) is a state vector composed of error coefficients of inertial devices, is the differential of x(t) relative to time t, f(x(t)) is the state equation function composed of x(t), w(t) is the dynamic noise, y is the observed quantity, h(x) is the state equation function composed of x(t) (t) is the observation equation function, and v(t) is the measurement noise.
[0059] S2, the state equation described in S1 and observation equation are carried out linearization, the function matrix after car...
Embodiment 2
[0088] A computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the steps of the method for determining the error coefficient of the above-mentioned device are realized.
Embodiment 3
[0090] Taking accelerometer error calibration as an example, the specific process is as follows figure 1 As shown, the accelerometer output error equation is designed as
[0091] A x =k 0x +δk x a x +k yx a y +k zx a z
[0092] In the formula, a x 、a y 、a z is the projected component of the gravitational acceleration corresponding to the three axes OX, OY, and OZ of the accelerometer housing coordinate system OXYZ; k 0x is the zero bias of the accelerometer; δk x is the linearity of the accelerometer; k yx and k zx are the installation error angles of the accelerometer input axis relative to OY and OZ; A x is the measurement error of the accelerometer.
[0093] Take the state variable as
[0094]
[0095] Because above-mentioned 4 error coefficients are all constant value, have nothing to do with time, then according to state equation and observation equation described in the present invention are:
[0096]
[0097] That is, the state equation function ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More