

Real-time video splicing method based on multiple unmanned aerial vehicles
A real-time video and multi-drone technology, applied in the field of video splicing, can solve problems such as heavy workload, high error rate, and easy omission of information, and achieve the effect of increasing splicing speed, improving splicing efficiency, and improving splicing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
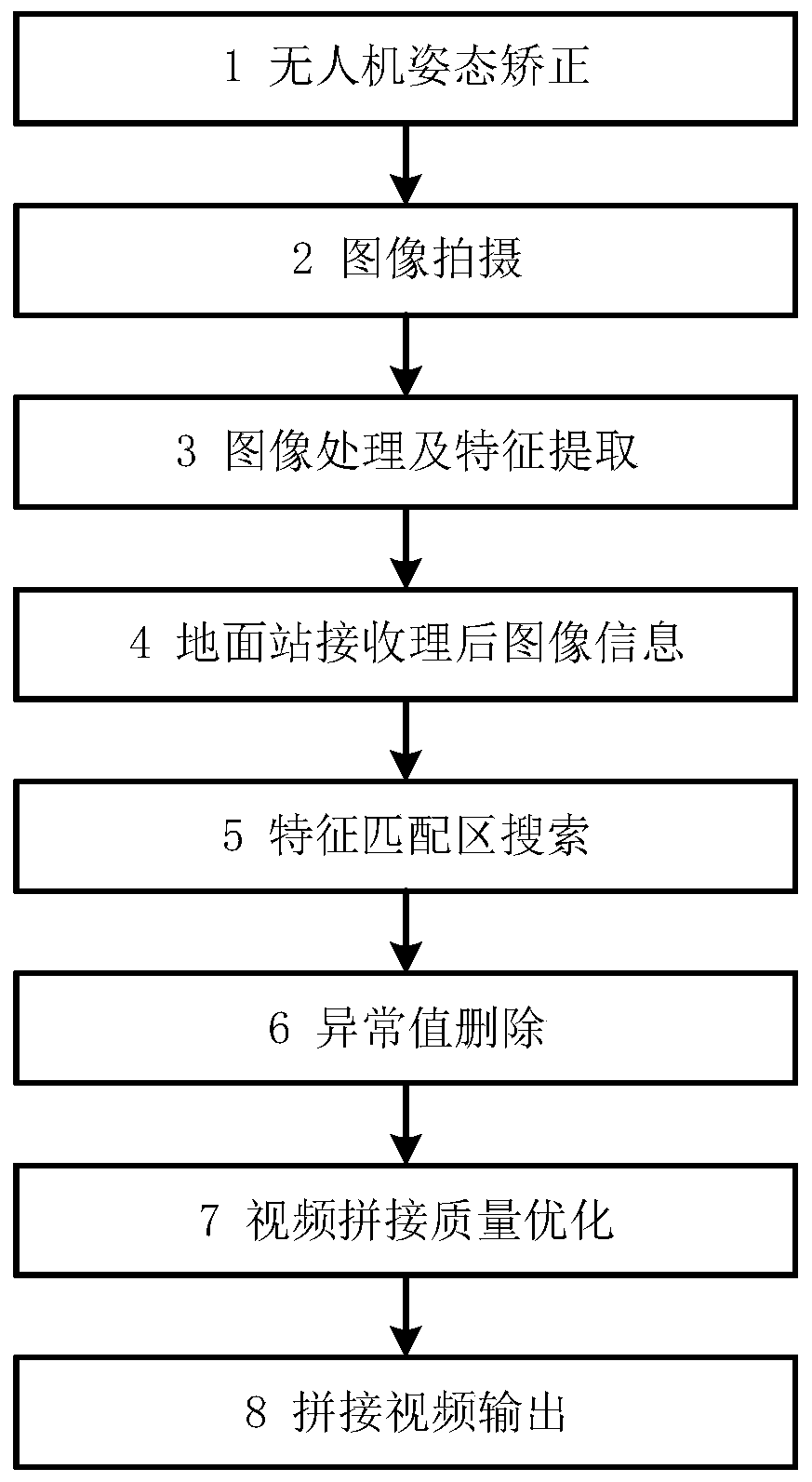
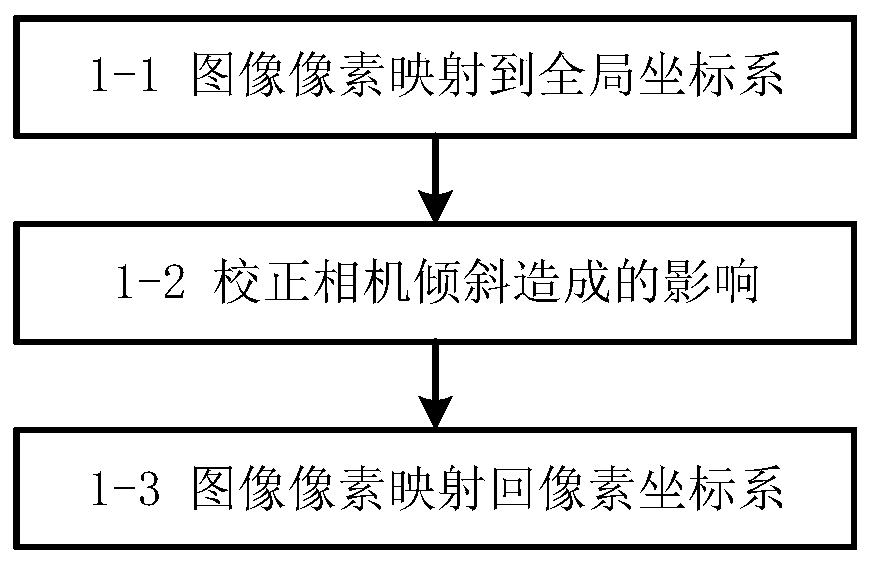
[0043] This implementation example is realized through the following technical solutions, such as figure 1 As shown, a real-time video stitching method based on multiple UAVs includes: 1. UAV posture correction, 2. Image shooting, 3. Image processing and feature extraction, 4. The ground station receives processed image information, 5. Feature matching area search, 6, outlier removal, 7, video splicing quality optimization, 8, spliced video output. Among them, UAV posture correction uses the mutual mapping relationship between the image pixel coordinate system and the global coordinate system, and adjusts in the global coordinate system; image processing and feature extraction are carried out by the UAV onboard CPU; feature matching area search uses the pixel coordinate system and The corresponding relationship of the global coordinate system is car...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More