

Dynamic collision prevention method for unmanned surface vehicle
An unmanned boat and collision avoidance technology, which is applied in non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve the problems of path oscillation, unrecognized path, and unreachable targets near obstacles, etc., to improve Running speed, effect of simple potential field function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
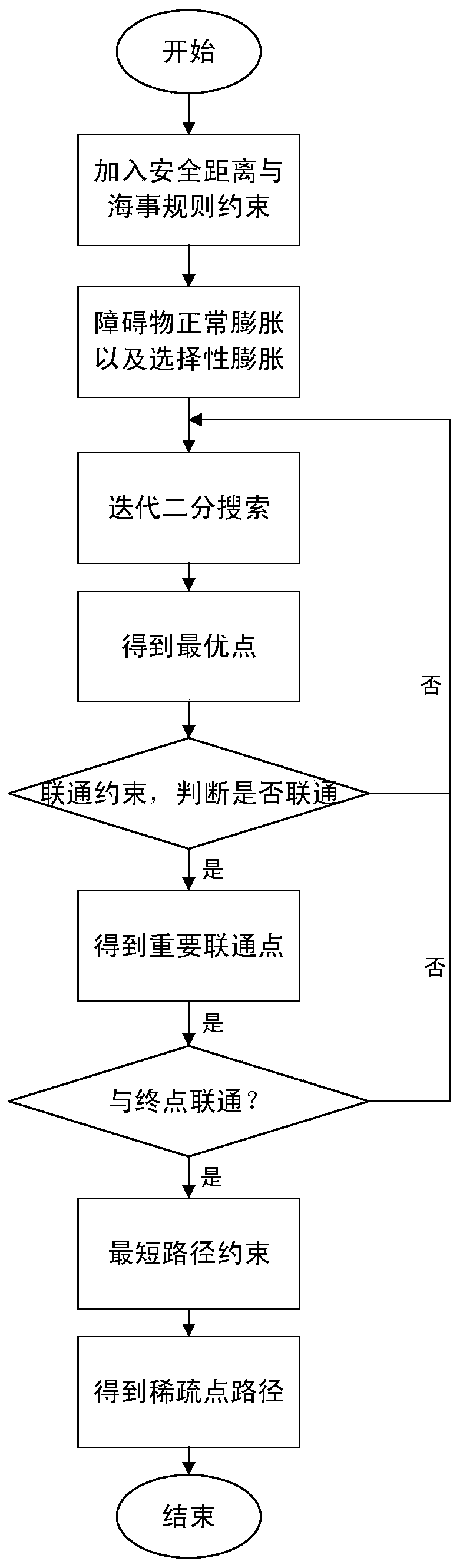
[0063] A dynamic collision avoidance method for an unmanned boat, comprising the steps of:
[0064] Preparations: The starting point, ending point, and the position, speed, and attribute information of the obstacle are known.
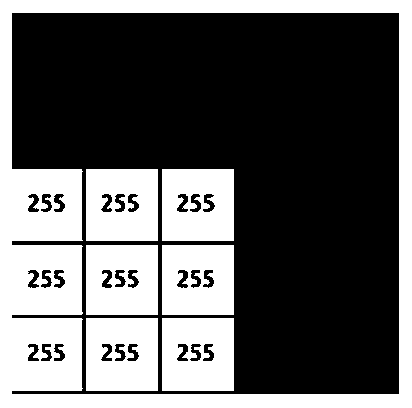
[0065] Step S10, rasterizing the environment map. Such as figure 2 As shown, the black part is 0, representing the feasible area, and the white part is 255, representing the obstacle area.
[0066] Step S20, establishing a potential field function model.
[0067] u cell (c)=U start (c)+U goal (c)
[0068] where U cell is the potential field function value of the current path point c, U start (c) Attract the potential field as the starting point, u goal (c) is the terminal attractive potential field, d(c,start) is the Euclidean distance from the current path point to the starting point, d(c,goal) is the Euclidean distance from the current path point to the end point, and a is the adjustment factor.
[0069] Step S30, establishing a safety ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More