

Unmanned aerial vehicle path planning method based on artificial potential field method and annealing algorithm
A technology of artificial potential field method and annealing algorithm, which is applied in the direction of vehicle position/route/height control, non-electric variable control, instruments, etc., to improve the anti-interference ability and solve the effect of local minimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0040] The described UAV path planning method based on artificial potential field method and annealing algorithm comprises the following steps:
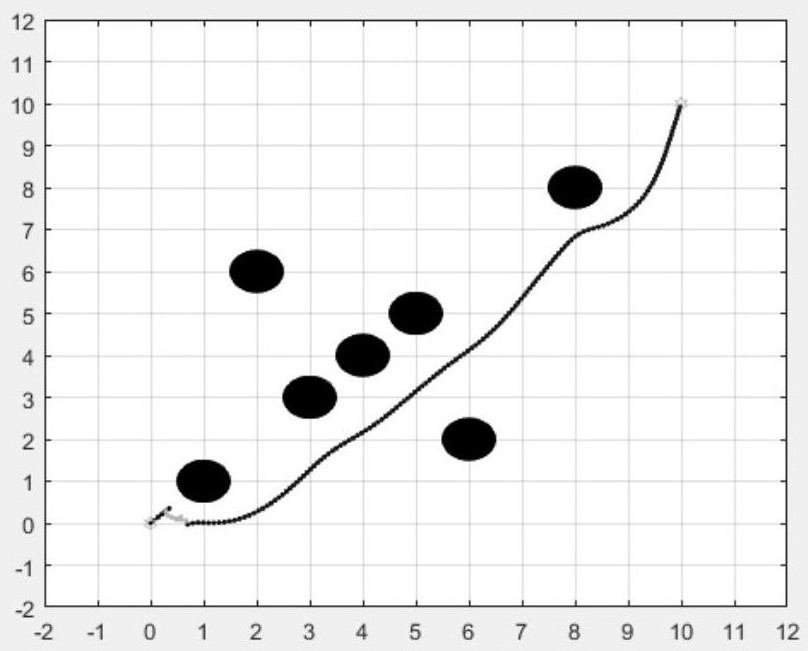
[0041] (1) Set parameters such as starting point, key point, obstacle, position, etc.;
[0042] (2) The UAV is regarded as a point, which moves in the virtual field formed by superimposing the gravitational field of the target point on the UAV and the repulsion field caused by obstacles to the UAV. The direction is the direction in which the potential field function descends, and the mathematical model is:
[0043] U(q)=U att (q)+U rep (q)
[0044] Among them, q is the coordinate of UAV, U att (q) is the gravitational field, U rep (q) is the repulsive force field, so it can be obtained that the resultant force on the UAV in the field is:
[0045]
[0046] The formula for calculating the gra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More