

A distributed formation control method for unmanned boats under the constraints of collision avoidance and connection maintenance
A control method and technology for unmanned boats, applied in the field of formation control of unmanned boats, can solve problems such as unmeasurable variables, system performance impact, and intractable derivatives of virtual controllers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
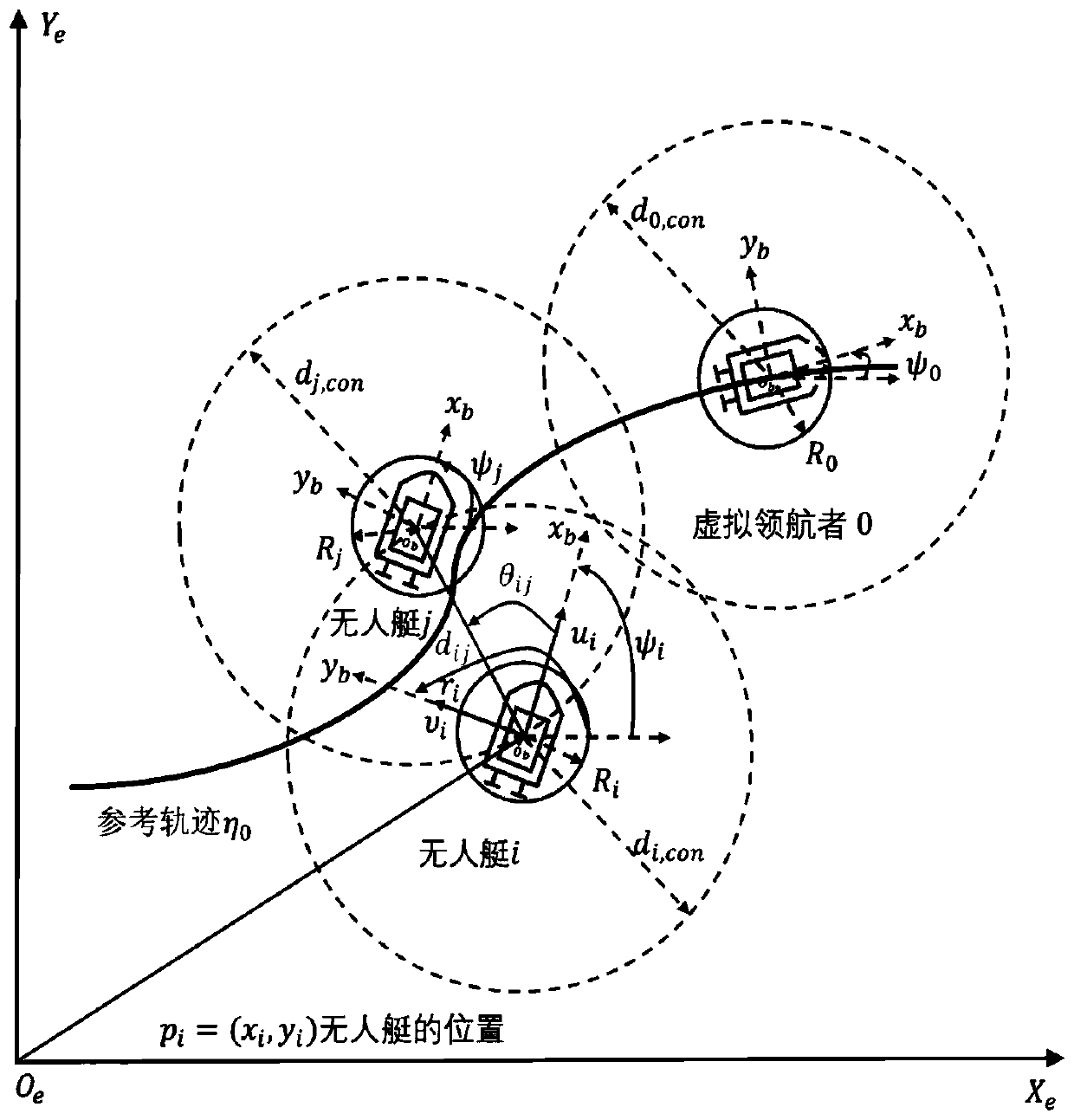
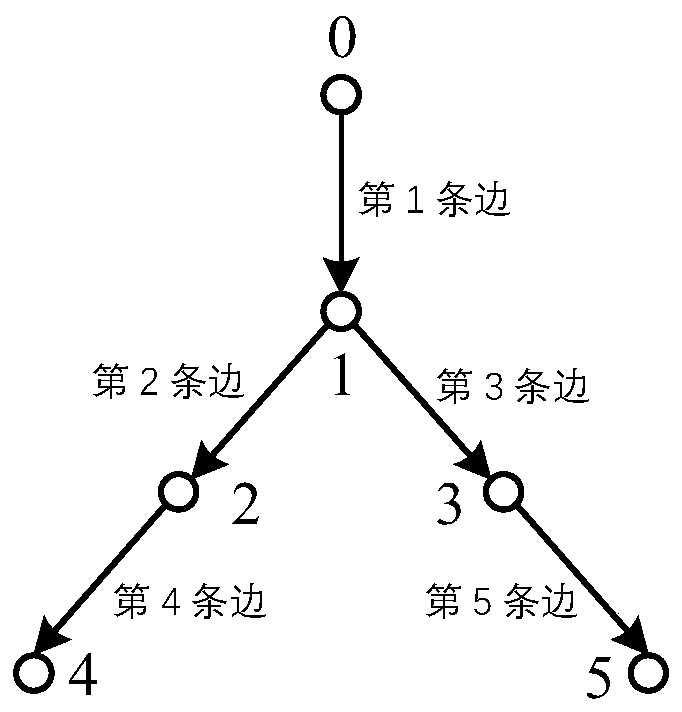
[0115] Distributed formation control of unmanned boats under the constraints of collision avoidance and connection maintenance. The formation contains a virtual leader and five followers. figure 1 is a schematic diagram of the basic formation structure in the working area, figure 2 It is the undirected communication topology diagram of the formation system.
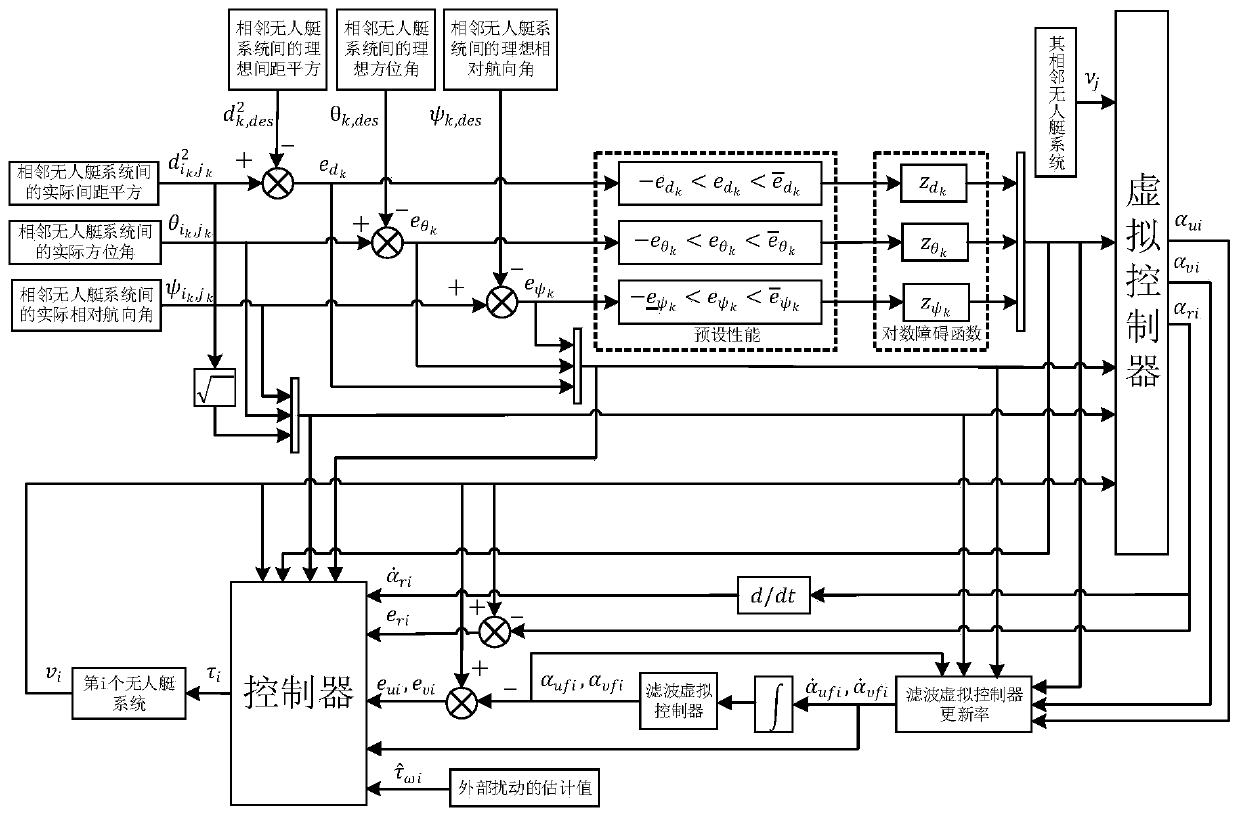
[0116] Such as image 3 Shown is the overall control block diagram of the distributed formation control of unmanned boats under the constraints of collision avoidance and connection maintenance. The detailed implementation process of the control method includes the following steps:
[0117] Step (1): Establish the kinematics and dynamics model of the i-th unmanned boat, and its vector form is:
[0118]
[0119] The first term in the above formula is the kinematic equation of the system. Among them, η i =[x i ,y i , ψ i ] T Indicates that the i-th unmanned boat is in the earth coordinate system (O e x e Y e ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More