

Point cloud matching algorithm based on EPFH features
A point cloud matching and feature point technology, applied in the field of point cloud data, can solve the problems that the features are easily affected by noise, take a long time, and have low matching accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
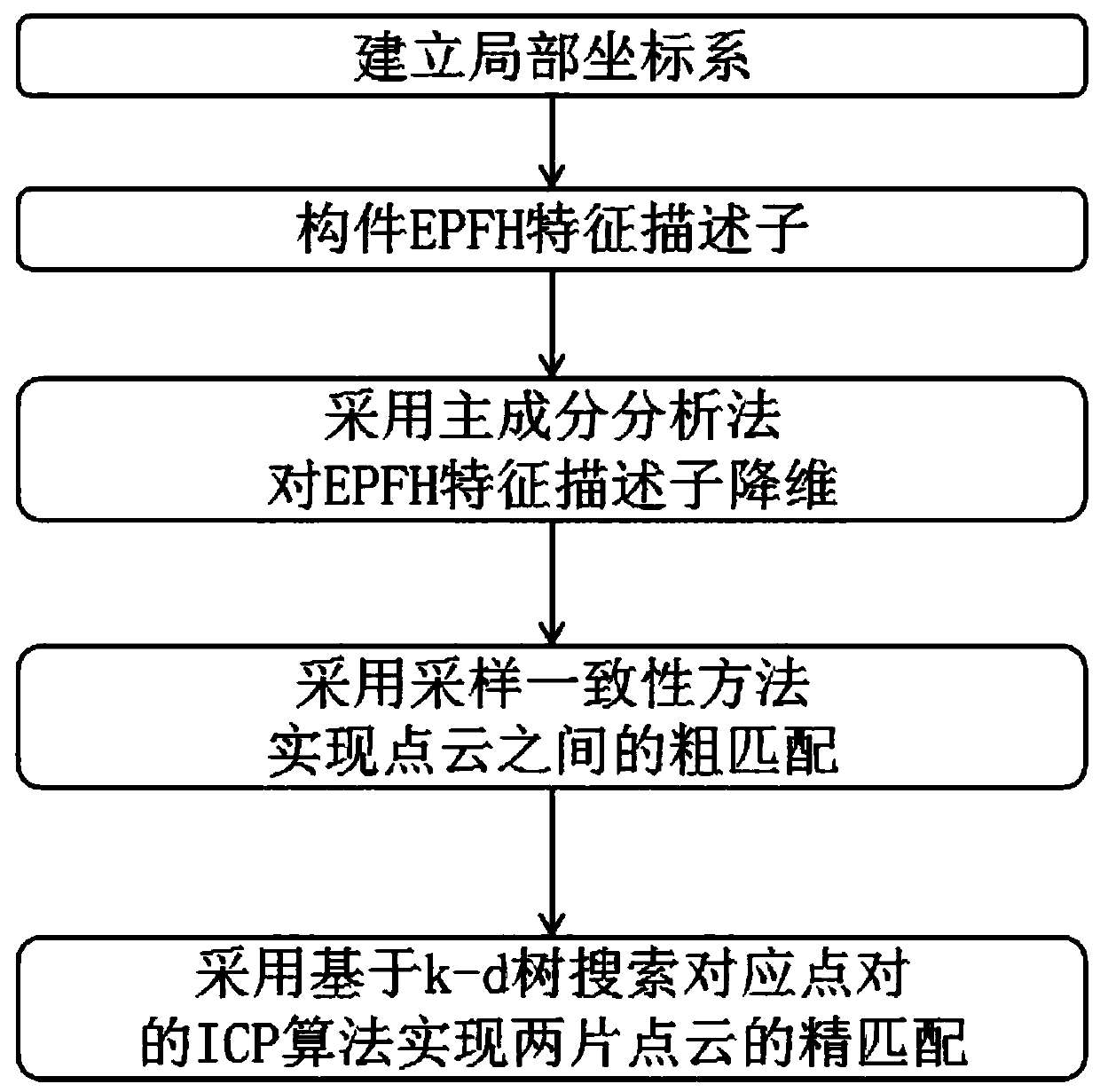
[0075] see figure 1 Shown, the present invention is a kind of point cloud matching algorithm based on EPFH feature, comprises the following steps:
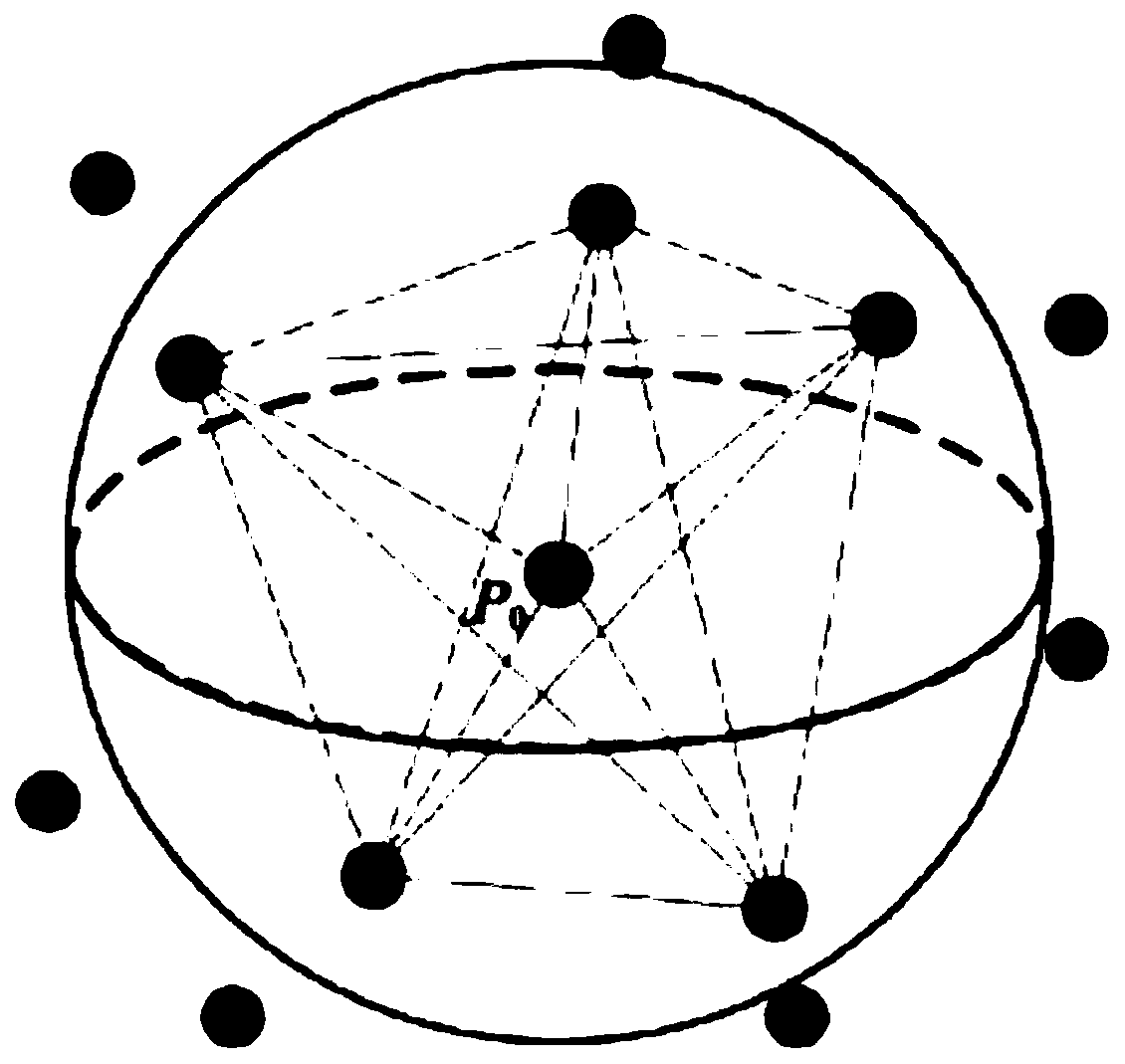
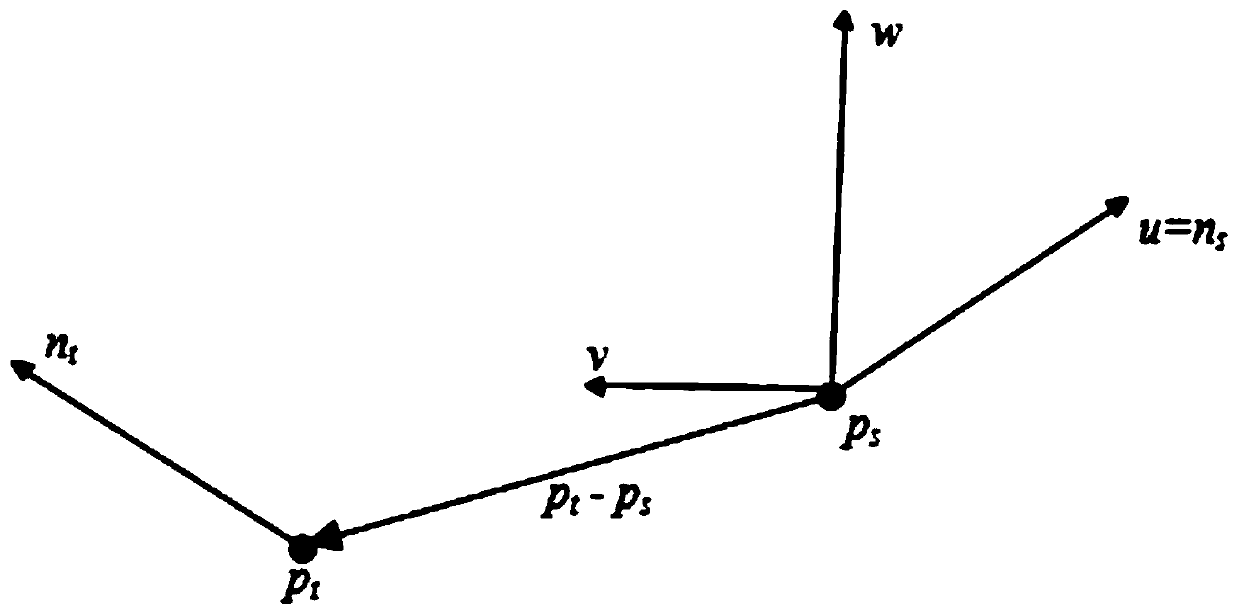
[0076] S0: establish a local coordinate system;
[0077] S1: component EPFH feature descriptor;
[0078] S2: Using principal component analysis to reduce the dimensionality of EPFH feature descriptors;
[0079] S3: Use the sampling consistency method to achieve rough matching between point clouds;
[0080] Among them, the specific process of rough matching is as follows:
[0081] S30: Select n sample feature points from the feature point set of the point cloud P to be matched;
[0082] Wherein, the distance between the sample feature points is not less than the preset minimum distance threshold d;
[0083] S31: Find one or more similar points with similar EPFH characteristics to the sampling points in the point cloud P to be matched in the feature point set of the target point cloud Q, and randomly select one from the similar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More