

Non-inductive three-dimensional face reconstruction method and acquisition reconstruction system
A technology of 3D face and target face, which is applied in the field of non-sensing 3D face reconstruction method and acquisition and reconstruction system, can solve the problems of poor accuracy, high equipment requirements, and complex structure, so as to reduce the error matching rate and improve Accuracy, the effect of reducing registration error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
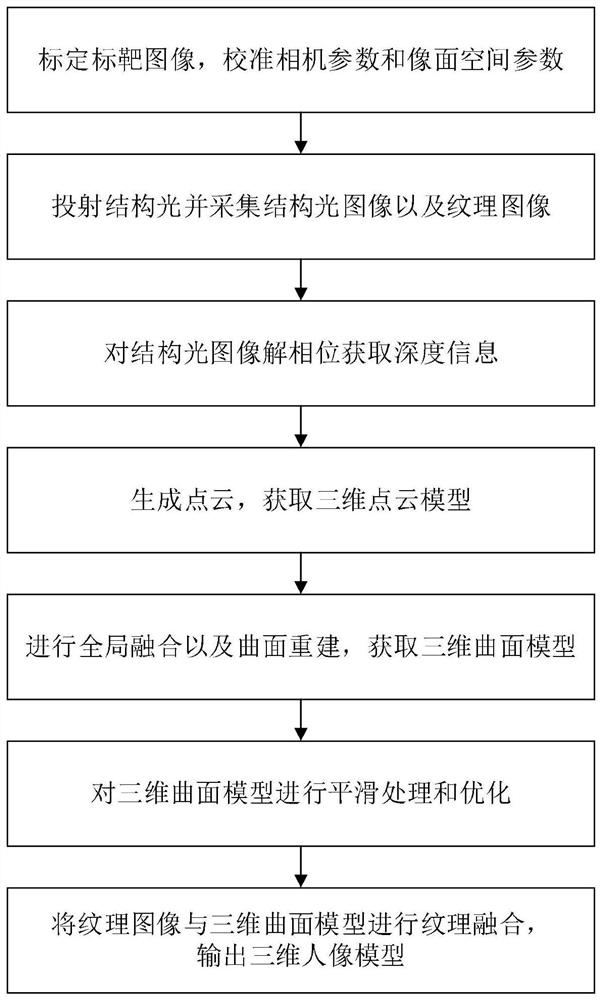
[0127] Such as figure 1 Shown, a kind of senseless three-dimensional face reconstruction method, described method comprises the following steps:
[0128] S1: Calibrate the target image by using a ring-type double-center calibration plate, and calibrate the camera parameters and image plane space parameters;
[0129] S2: Projecting a structured light image to the target face according to the camera parameters and image plane space parameters and collecting reflected structured light image data and texture images;
[0130] S3: Dephasing the structured light image data to obtain depth information of the target face;
[0131] S4: Use the ICP point cloud algorithm to generate a point cloud to obtain a three-dimensional point cloud model;
[0132] S5: Perform global fusion and surface reconstruction on the 3D point cloud model by using an implicit function method to obtain a 3D surface model;
[0133] S6: smoothing and optimizing the three-dimensional surface model by using the l...
Embodiment 2
[0165] This embodiment is a further description of Embodiment 1.
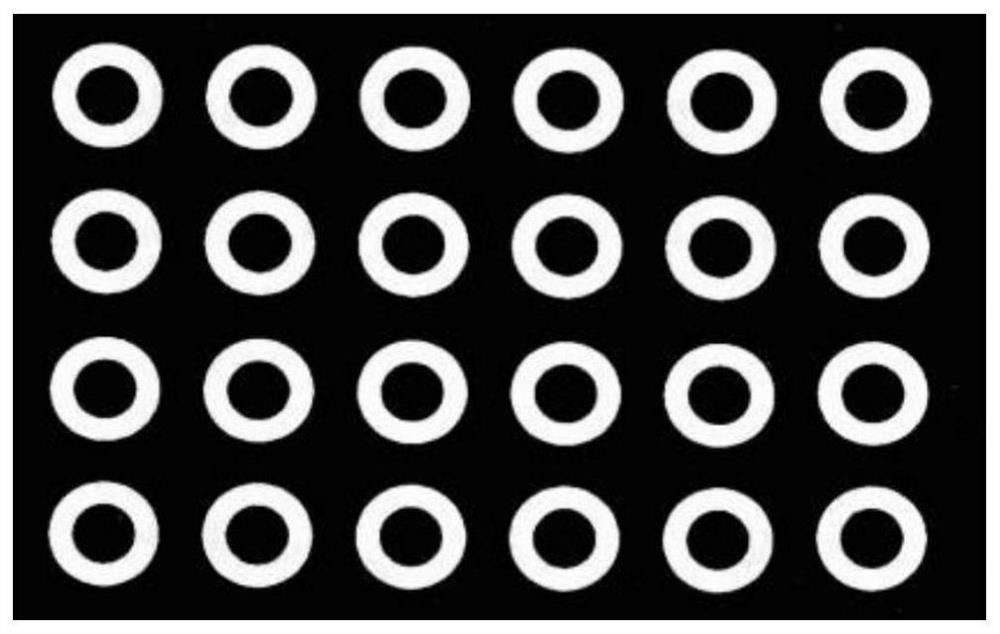
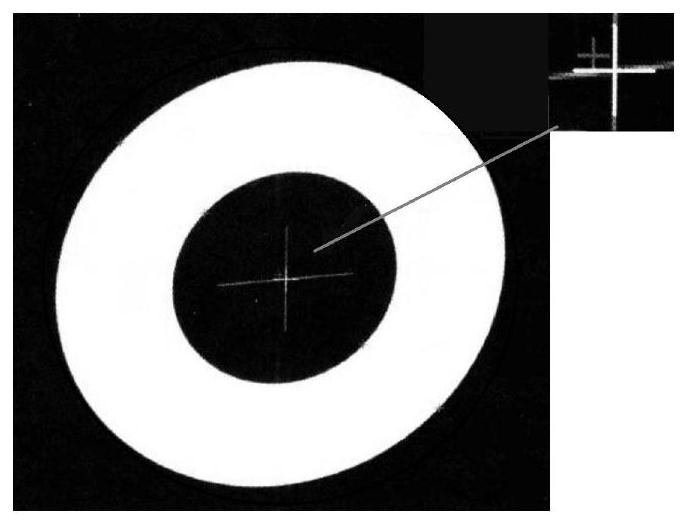
[0166] S1: Calibrate the target image by using a ring-type double-center calibration plate, and calibrate the camera parameters and image plane space parameters;
[0167] Such as figure 2 and image 3 As shown, the present invention uses the target image of the high-precision circular double-center calibration plate under the set attitude in the measurement space to realize the precise calculation of camera parameters and system parameters. The method improves the calibration accuracy. Calibration parameters are stored in hardware memory such as flash, and the application software starts and establishes a communication connection with the camera to read the calibration parameters into the memory.
[0168] The calibration process of the stripe structured light 3D modeling system is mainly completed through the following three steps:
[0169] Step 1: Calibrate the internal and external parameters of the came...
Embodiment 3
[0325] A non-sensing three-dimensional face acquisition and reconstruction system includes a cloud server and an acquisition device.
[0326] Described cloud server can carry out a kind of senseless three-dimensional face reconstruction method described in embodiment 1 and 2;
[0327] Such as Figure 8 As shown, the collection device includes a front collection unit 1 , a side collection unit 2 , a communication module, a support column 4 , a base 3 and a switch 5 .
[0328] The communication module communicates with the cloud server, and is used to send the collected image data to the cloud server for processing.
[0329] The base 3 is provided with a controller, a cooling module and a communication module; the cooling module is used to cool down the controller; the communication module is used to exchange data with external devices. At the same time, at least three adjustable rubber foot pads 11 are provided under the base 3 for supporting the system.
[0330] The switch ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More