

Path tracking control method suitable for high-speed limiting working condition
A technology of path tracking and extreme working conditions, which is applied to control devices and other directions, and can solve problems such as path tracking failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0103] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
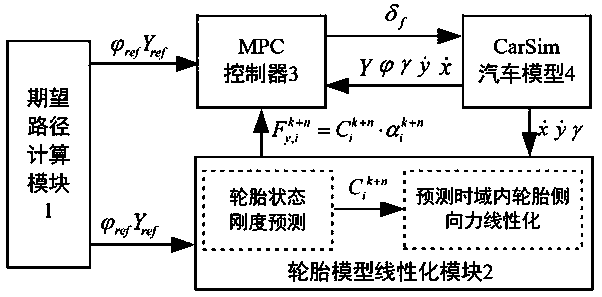
[0104] figure 1It is a system structural diagram of a path tracking control method suitable for high-speed extreme working conditions of the present invention. The system mainly includes a desired path calculation module 1, a tire model linearization module 2, an MPC controller 3 and a CarSim vehicle model 4; the desired path The calculation module 1 is used to calculate the expected lateral displacement and yaw angle of the vehicle; the tire model linearization module 2 is used to realize the linear approximation of the nonlinear tire force in the predicted time domain; the CarSim vehicle model 4 is used to output the actual state quantity of the vehicle, Including vehicle longitudinal velocity, lateral velocity, yaw angular velocity, yaw angle and lateral displacement; MPC controller 3 solves the front wheel angle of the vehicle according to the exp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More