

Mechanical arm on-line obstacle avoidance movement planning method
A technology of motion planning and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that are difficult to meet the requirements of real-time movement of manipulators, reduce the speed of finding the shortest path, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific embodiments of the present invention will be described in further detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
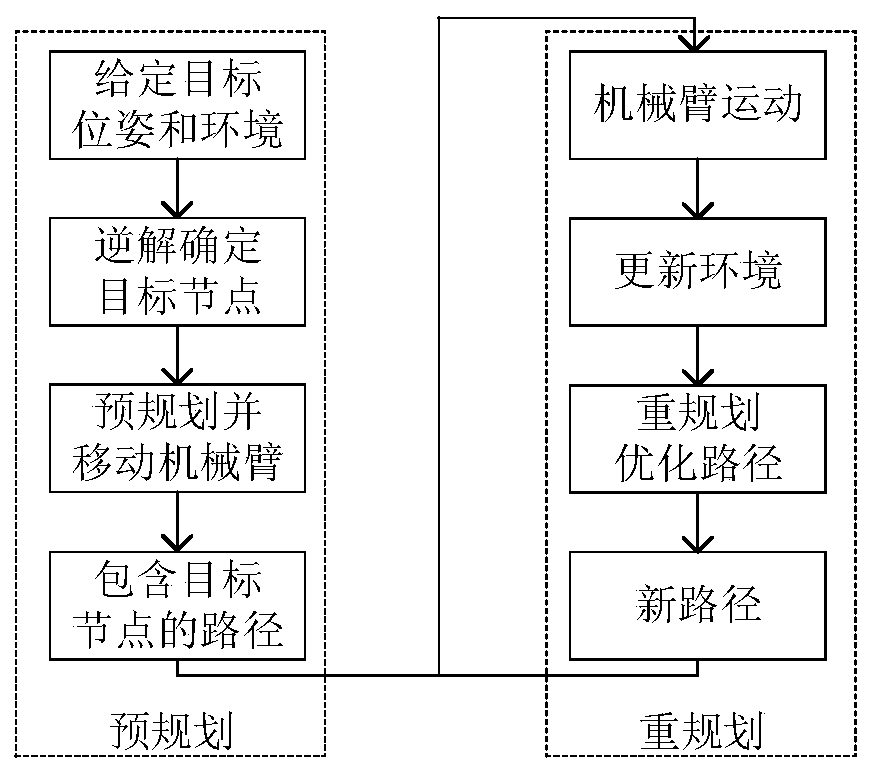
[0043] In this embodiment, an online obstacle avoidance movement planning method of a mechanical arm, such as figure 1 As shown, including the following steps:
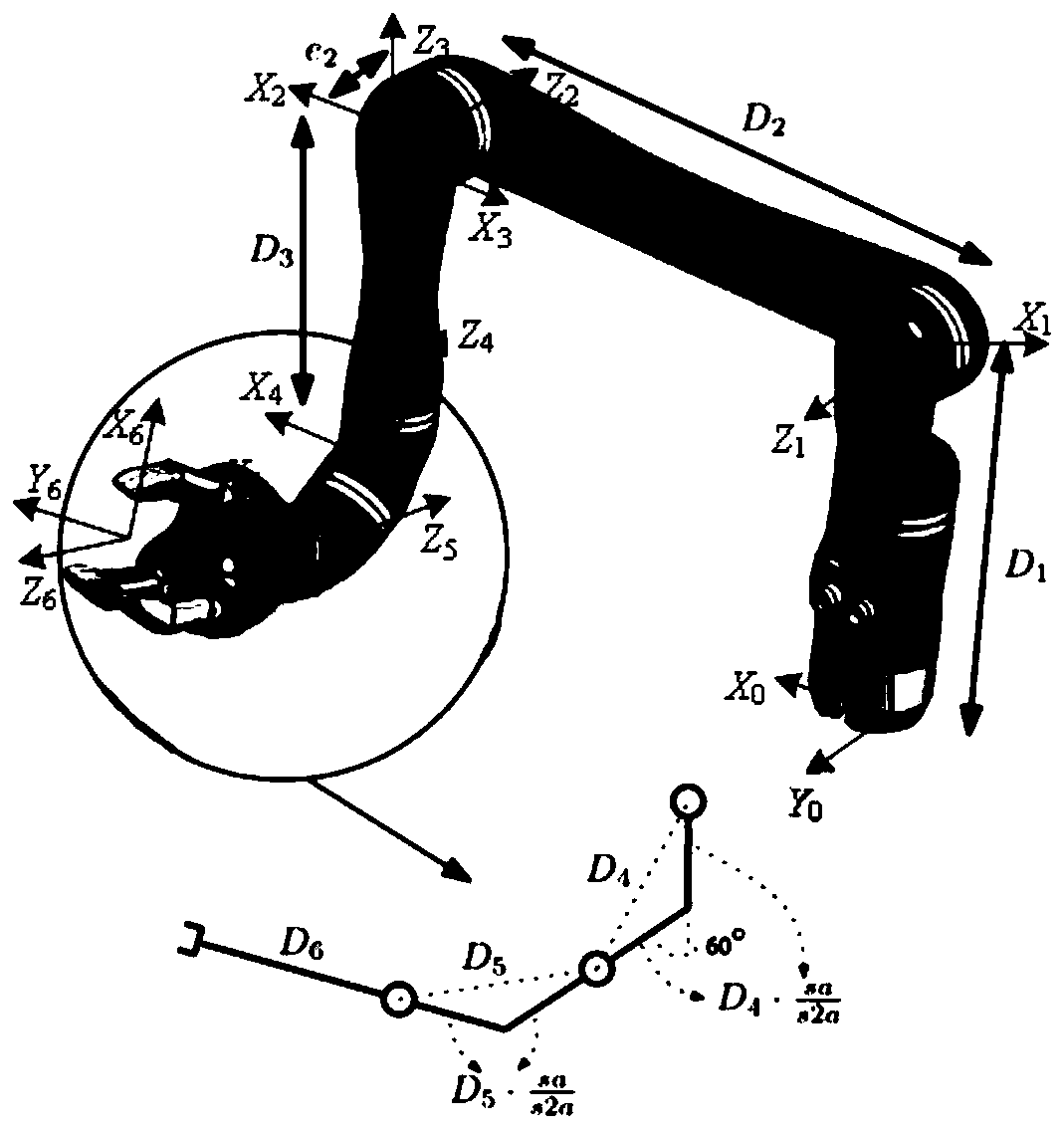
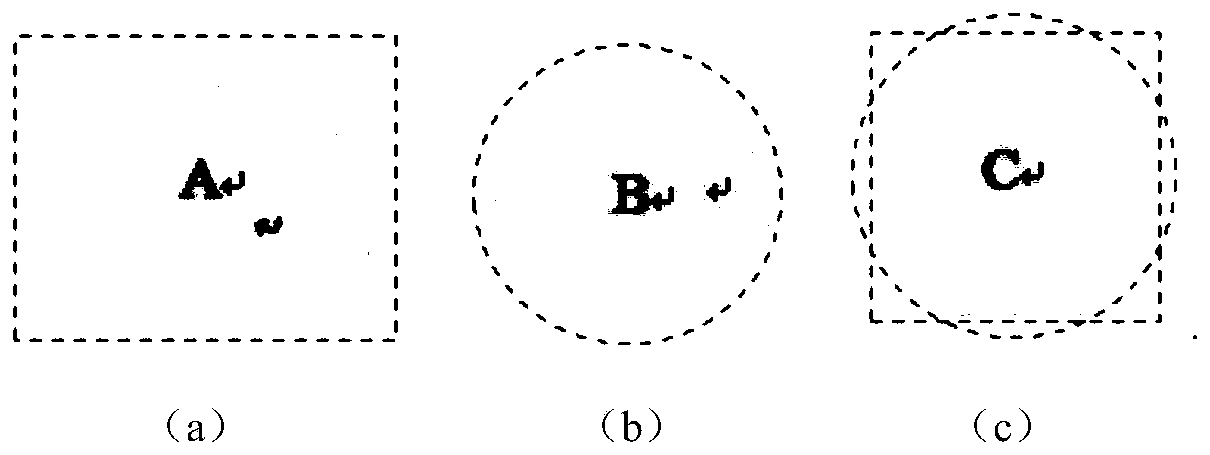
[0044] Step 1: Use the D-H method to model the six-degree-of-freedom manipulator, use the axial bounding box and spherical bounding box technology to build the model of the obstacle, and give the starting point and target point coordinates in Cartesian space;
[0045] In this embodiment, a 6-DOF manipulator model is first established, such as figure 2 As shown, each joint is a rotary joint, rotating around the z axis, where (X 0 , Y 0 ,Z 0 ) Is the base coordinate system, (X 6 , Y 6 ,Z 6 ) Is the end coordinate system. The D-H parameters of the robotic a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More