

Non-model robot multi-peg-in-hole assembly control method capable of using environment forecasting for optimization
A technology of predictive optimization and assembly control, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., and can solve a large number of problems such as attempts and unusable application scenarios
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] The present invention proposes a non-model robot multi-axis hole assembly control method using environment prediction optimization, which is further described below in conjunction with the accompanying drawings and specific embodiments.
[0046] The present invention proposes a non-model robot multi-axis hole assembly control method using environment prediction optimization, including the following steps:
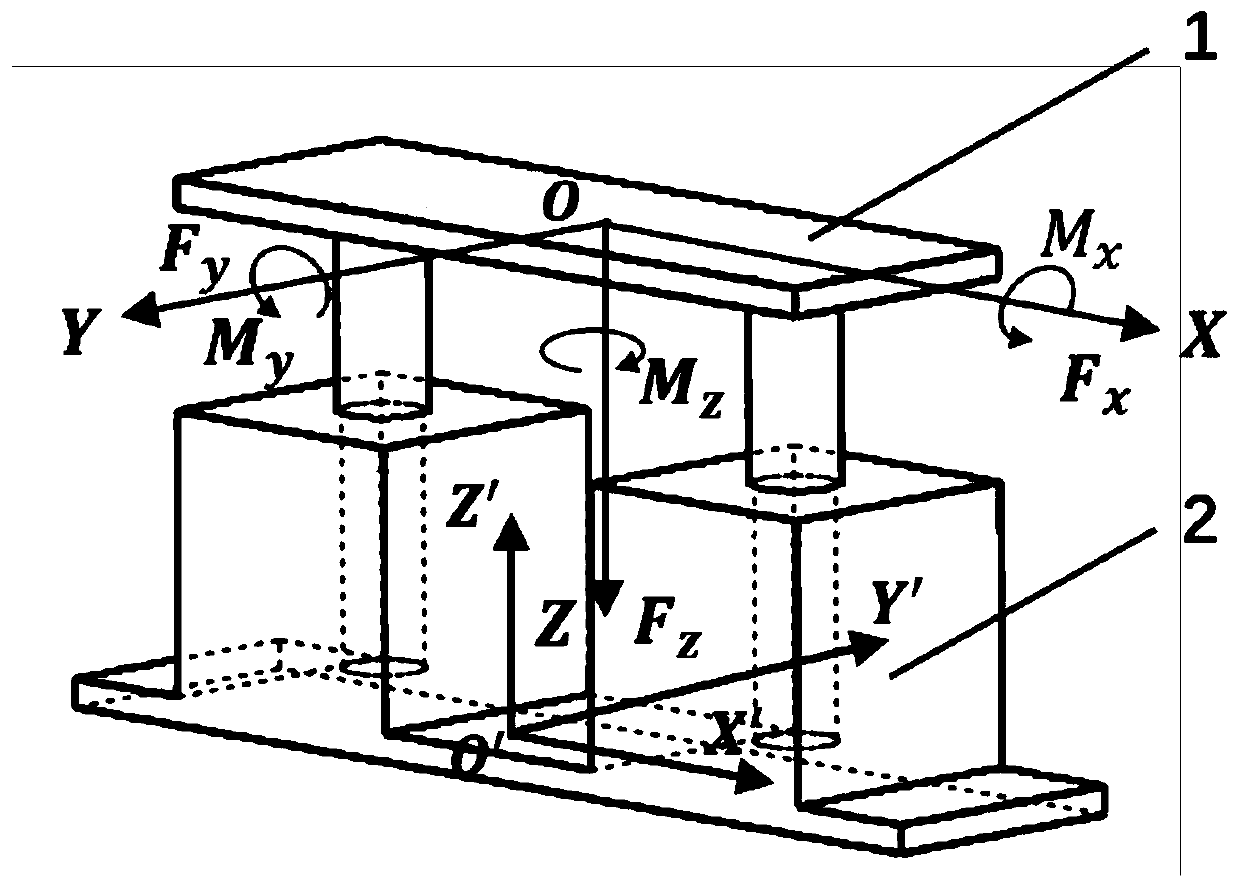
[0047] 1) Establish a biaxial hole assembly experiment platform, the structure of the biaxial hole assembly experiment platform is as follows: figure 1 as shown, figure 1 Among them, 1 is the dual-axis part to be assembled, and 2 is the dual-hole part to be assembled. Install any sensor that can collect six-dimensional force (the six-dimensional force sensor of ABB used in the present invention) to the end of the robot (the present invention can use a conventional model of robot, and this embodiment uses) ABB IRB 1200) for execution On the device, fix the double-ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More