

A multi-UAV landing device based on mechanical arm assistance and parallel four-bar linkage mechanism for unmanned boat platform
A parallel four-link, multi-UAV technology, which is applied in the direction of aircraft ships, manipulators, transportation and packaging, etc., can solve the problems that UAVs cannot take off and land, and unmanned boats cannot carry multiple UAVs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
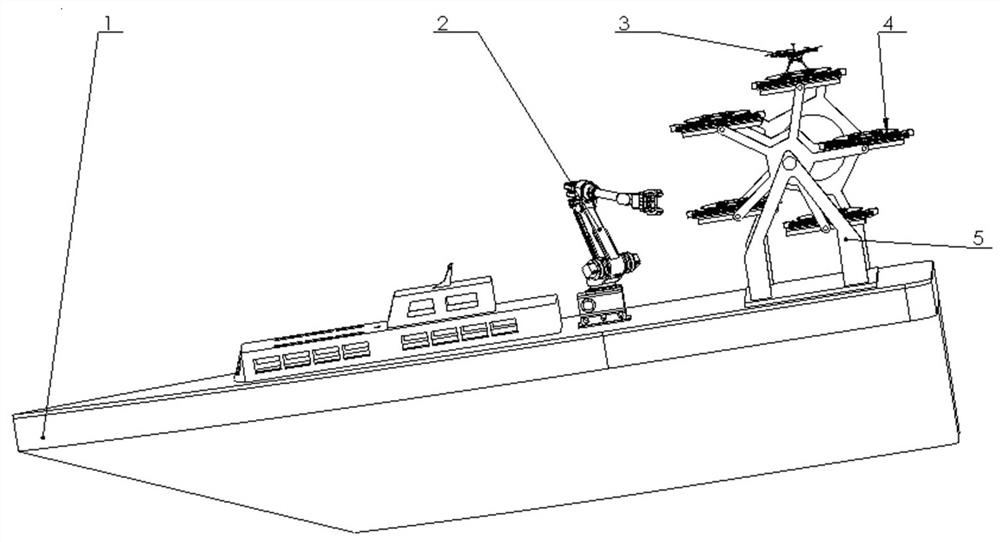
[0039] A multi-unmanned aerial vehicle landing device based on mechanical arm assistance and parallel four-bar linkage mechanism for unmanned boat platform, its structure is as follows Figure 1-Figure 9 As shown, including the unmanned boat 1, the unmanned boat 1 is provided with a multi-layer rotating platform 5, and any platform on the multi-layer rotating platform 5 is provided with a UAV fixing device 4, and the UAV fixing device 4 Unmanned aerial vehicles 3 are arranged on the above, and the shipboard mechanical arm system 2 that cooperates with the multi-layer rotating platform 5 is also provided on the unmanned boat 1, and the control system is provided on the unmanned boat 1.
[0040]The multi-layer rotating platform 5 includes a bracket 501 arranged on the unmanned boat 1. The bracket 501 is provided with a rotating shaft 506 flexibly connected with the bracket 501. The rotating shaft 506 is provided with an outer eccentric rotating star wheel 502. The rotating shaft ...
Embodiment 2
[0044] A multi-unmanned aerial vehicle landing device based on mechanical arm assistance and a parallel four-bar linkage mechanism for an unmanned boat platform is different from Embodiment 1 in that the rotating shaft 506 is connected to the rotating motor through a conveyor belt.
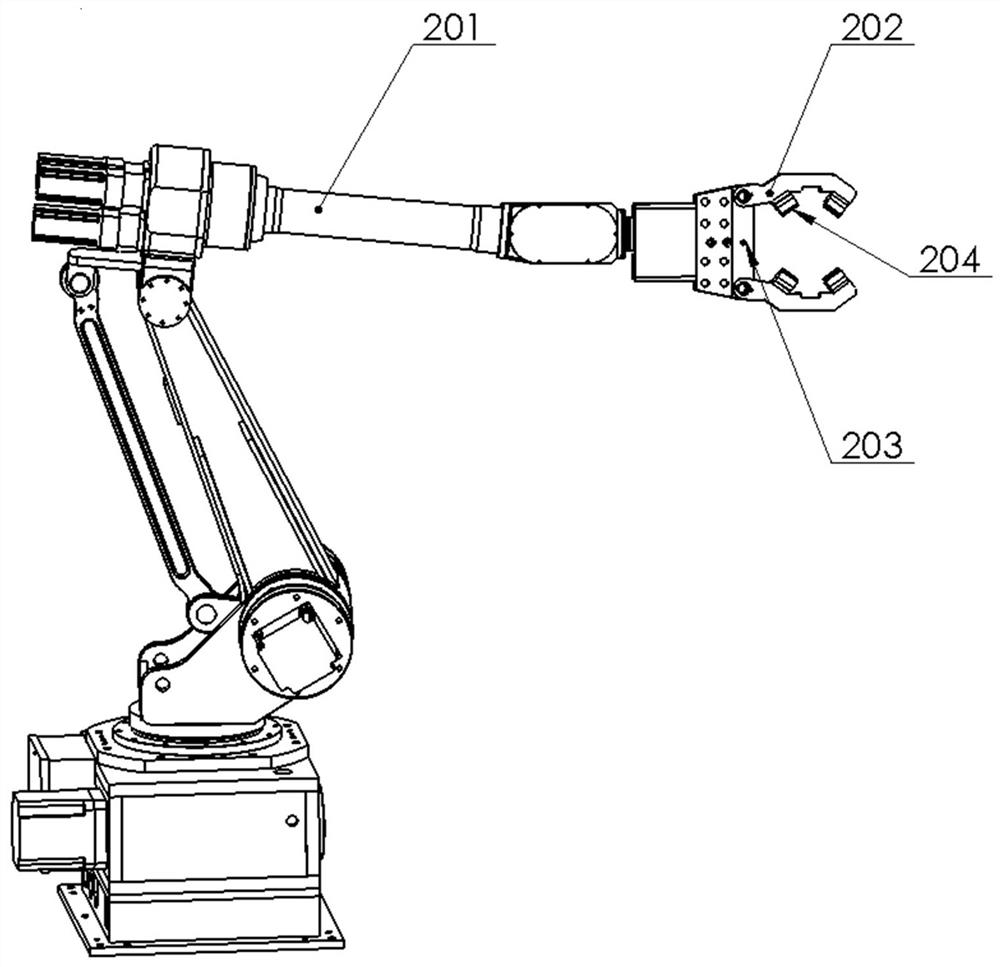
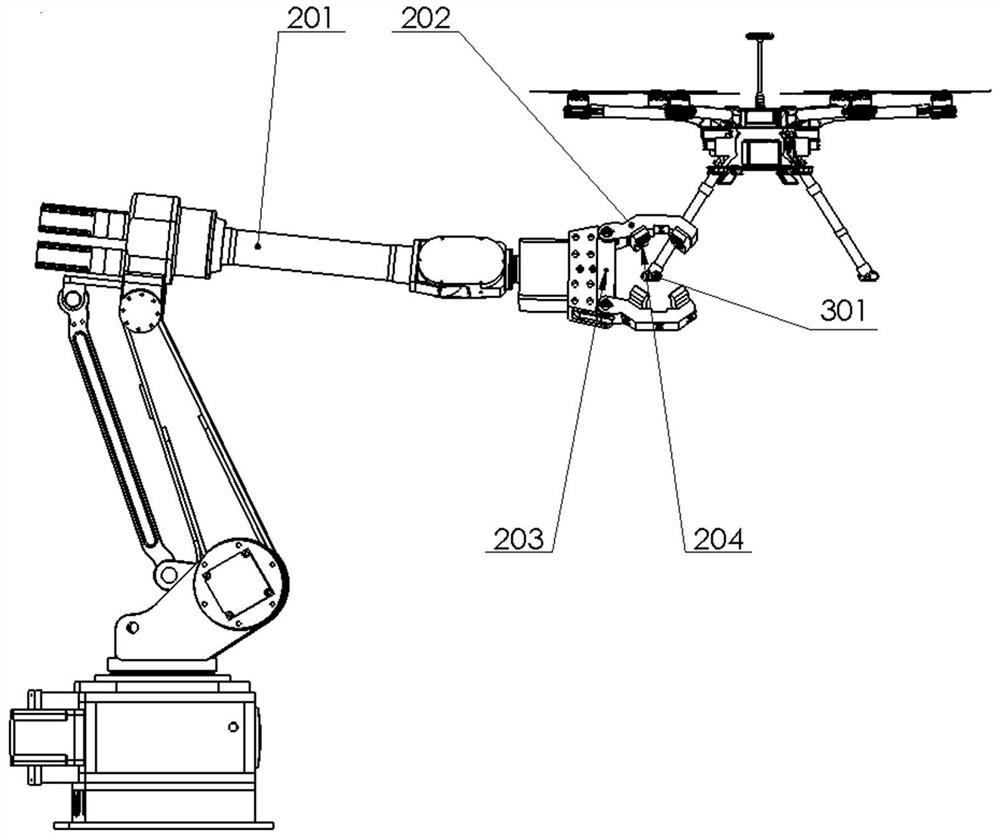
[0045] When the drone 3 needs to land due to various reasons, the drone 3 can obtain the landing position through the communication between the drone 3 and the unmanned boat 1, and the industrial six-degree-of-freedom mechanical arm 201 and the control system can be calculated by the control system. A suitable suspended position between the landing positions, and the UAV 3 descends to a suitable position. The binocular camera 203 on the industrial six-degree-of-freedom mechanical arm 201 captures the drone 3, controls the clamp actuator 202 to grab one side of the drone 3, and controls the clamp actuator 202 to grab the landing gear 301 of the drone. The installed force sensor 204 monitors the str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More