

Mobile robot path planning method based on improved ant colony algorithm
A mobile robot and path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems that the optimal solution cannot be found, and the ant colony algorithm falls into local optimum, so as to reduce randomness , the effect of improving the effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
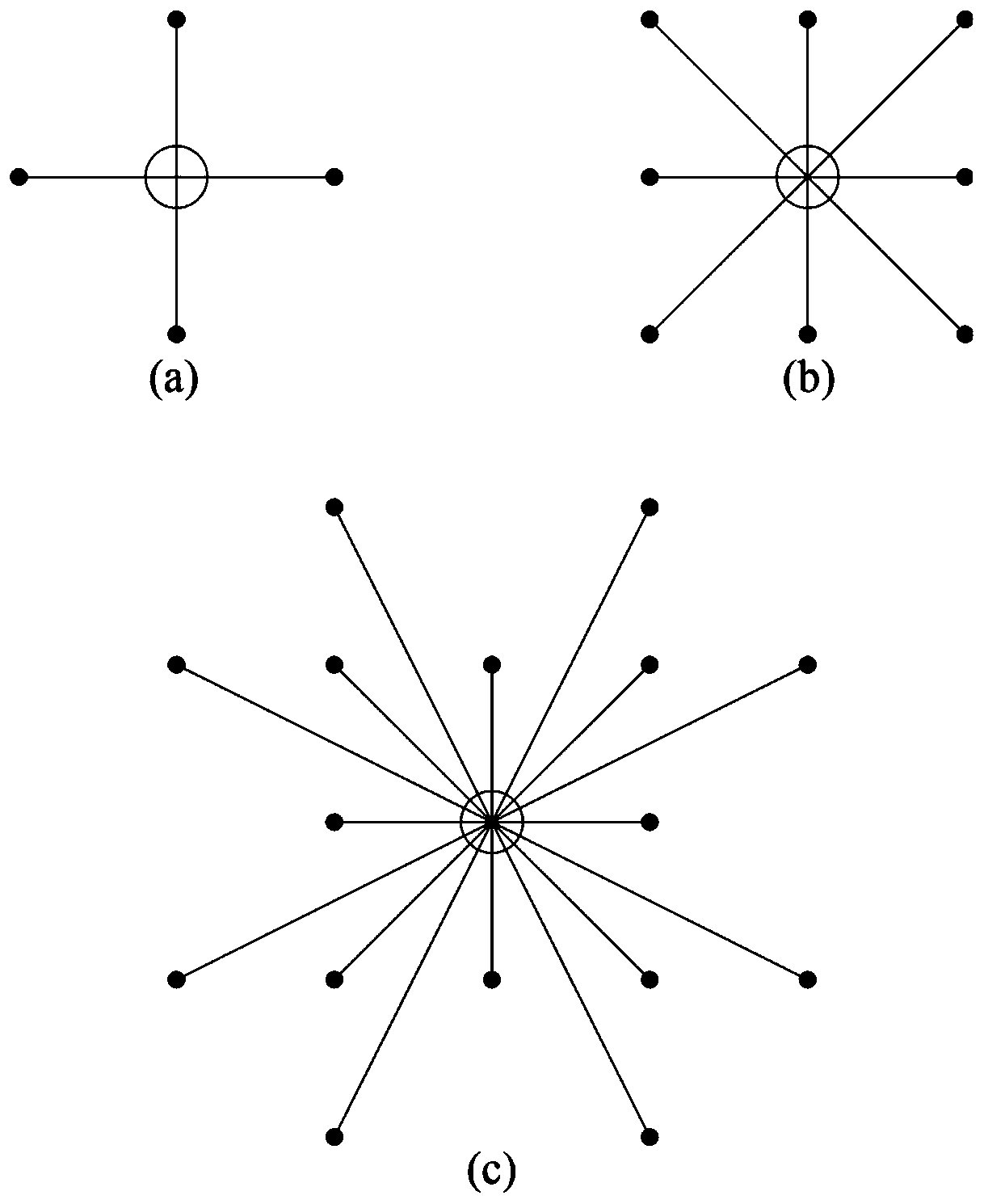
[0070] The present invention provides a mobile robot path planning method based on the improved ant colony algorithm, and proposes an improved ant colony algorithm with 16 search directions and 24 neighborhood nodes, so that ants have more advantages in the path search process of robot planning. More direction selection and wider search range, and two heuristic information calculation methods based on vector angles are designed; in addition, in the transition probability part, the effective search of ants in the grid map is controlled by introducing the transition probability control parameters range, a better global shortest path can be searched, the effectiveness of the algorithm search can be improved, and the randomness of the search can be reduced.
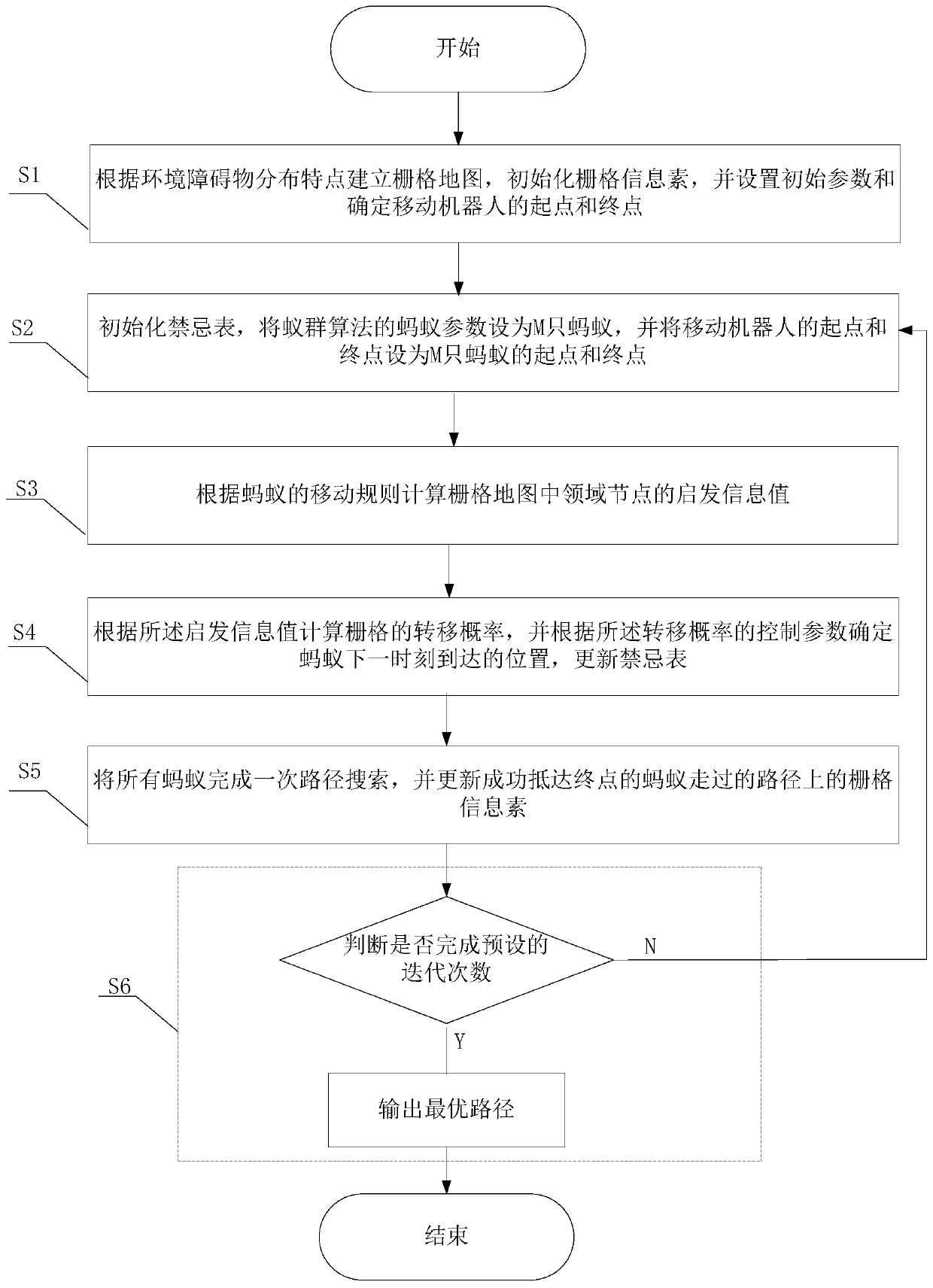
[0071] Such as figure 1 As shown, the present invention provides a mobile robot path planning method based on the improved ant colony algorithm, and its implementation method is as follows:
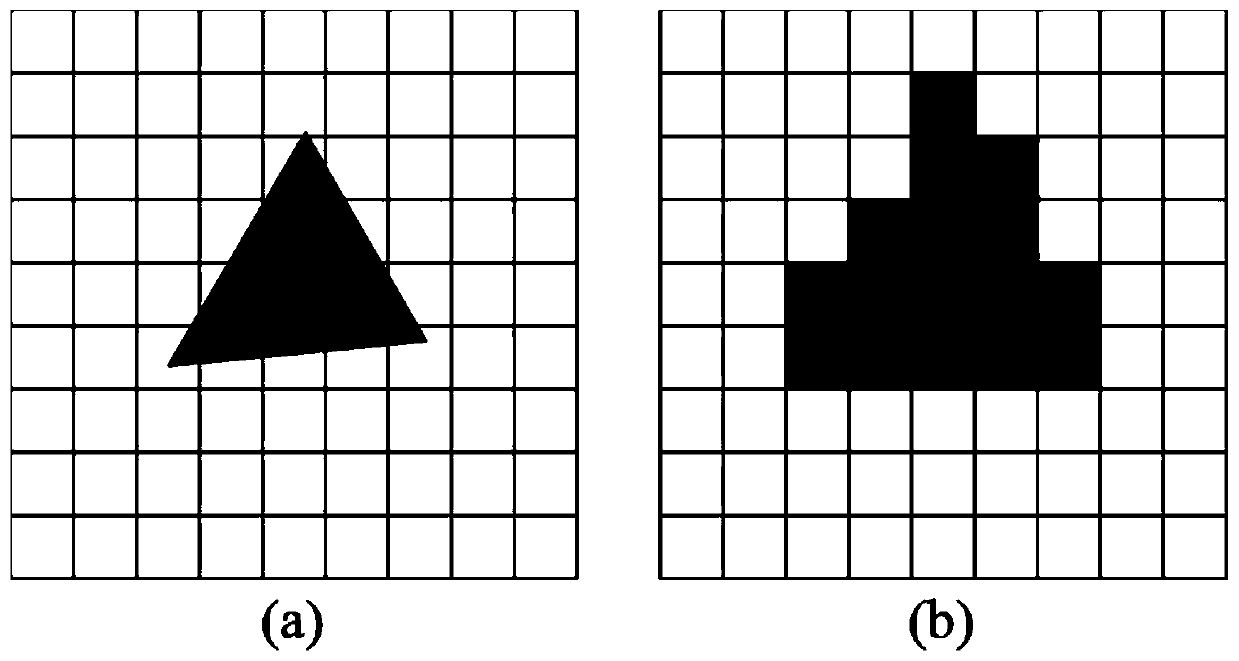
[0072] S1. Establish a grid map ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More