

Foot force and moment following control method of bipedal robot
A biped robot and following control technology, which is applied in the field of robotics, can solve the problems of control effect influence, unreality, and not too good effect, and achieve ideal following effect, good ground force and torque following effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments are only It is a part of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work all belong to the protection scope of the present invention .
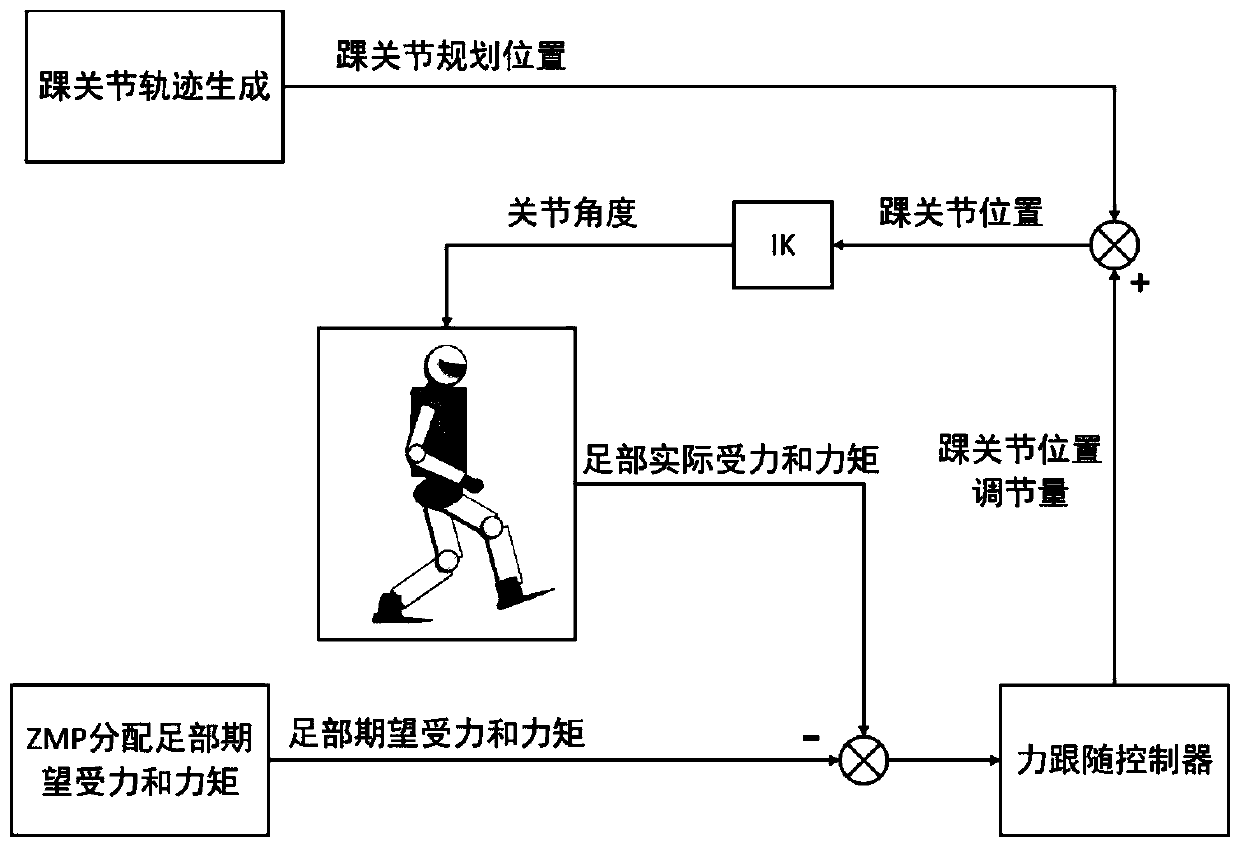
[0033] like figure 1 As shown, a biped robot foot force and moment following control method distributes the expected force and moment of the robot foot through the planned zero moment point ZMP of the robot, and the expected force of the foot and the expected moment of the foot The difference between the actual force on the foot and the actual moment o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More