

A closed-loop control system for wrist rehabilitation exoskeleton based on force feedback
A closed-loop control, exoskeleton technology, applied in passive exercise equipment, physiotherapy, gymnastics equipment, etc., can solve the problems of increasing the risk of secondary injury, difficult to use rehabilitation therapy, large volume and weight, etc. risk of secondary injury, improved rehabilitation, improved anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
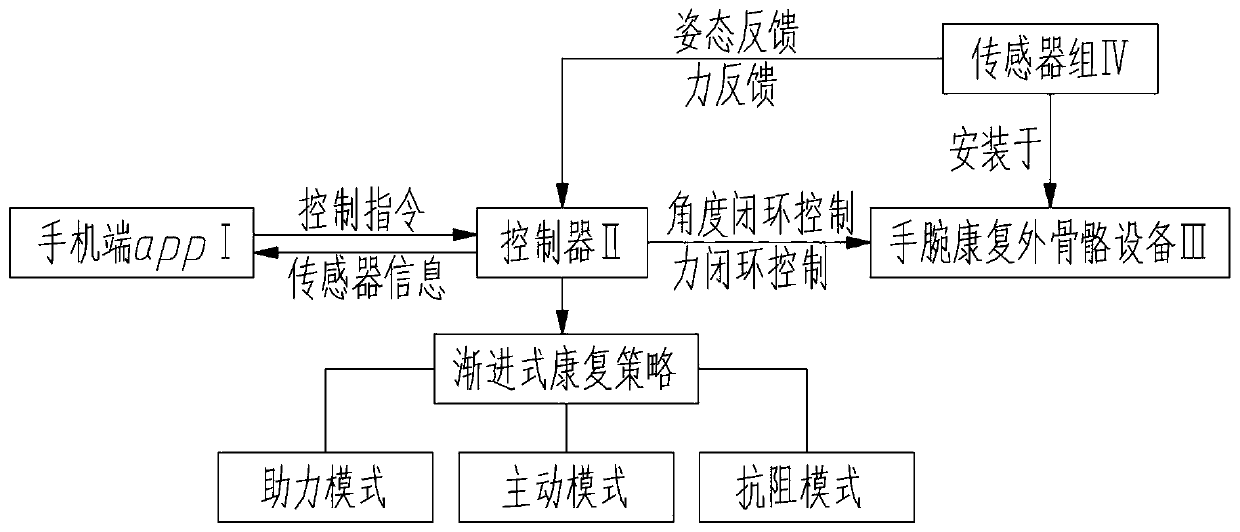
[0049] The present invention builds a closed-loop control system for wrist rehabilitation exoskeleton equipment, and specifically formulates a closed-loop control scheme, wherein the closed-loop control scheme includes closed-loop control of the angle of the wrist and control of the driving force of the exoskeleton, so as to realize the control of the posture of the wrist and the driving force of the exoskeleton Real-time monitoring, on the basis of posture feedback and force feedback, a progressive rehabilitation strategy is formulated according to the muscle state of the patient's wrist. The rehabilitation strategy includes assist mode, active mode, and resistance mode.
[0050] The control system realizes the feedback control of the wrist attitude angle and the feedback control of the drivi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More