

Unmanned aerial vehicle route planning method considering arrival time constraint
A technology of arrival time and track planning, applied in three-dimensional position/channel control, non-electric variable control, instruments, etc., to achieve the effect of improving search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
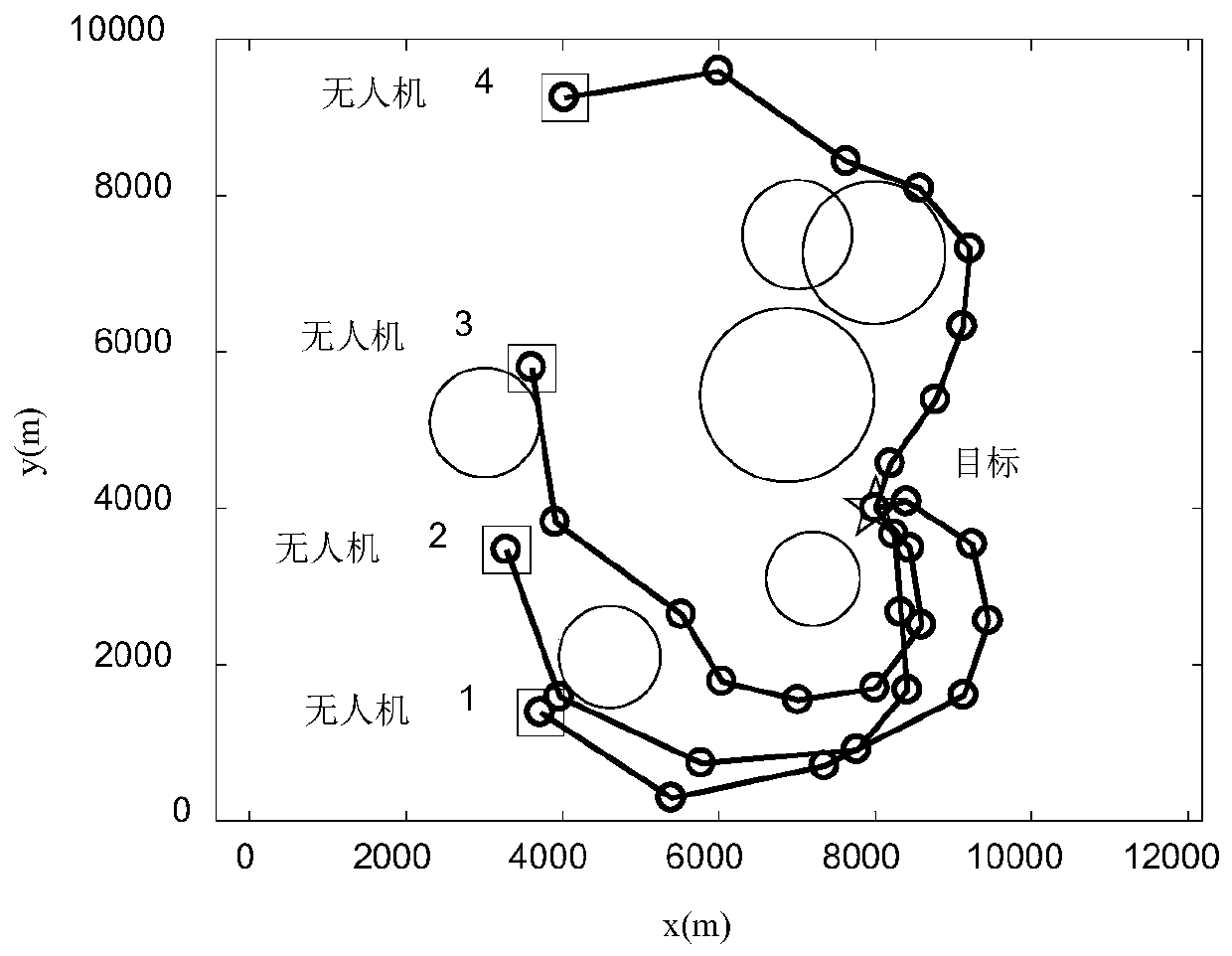
[0072] The simulation hardware is Intel Core i5-6200CPU 2.30GHz, 8G memory, and the simulation environment is MATLABR2016b. UAV formations perform missions in a two-dimensional environment of 10km×10km. The trajectory planning requires the UAV to avoid the no-fly zone in the environment during the process from the starting point to the target point.
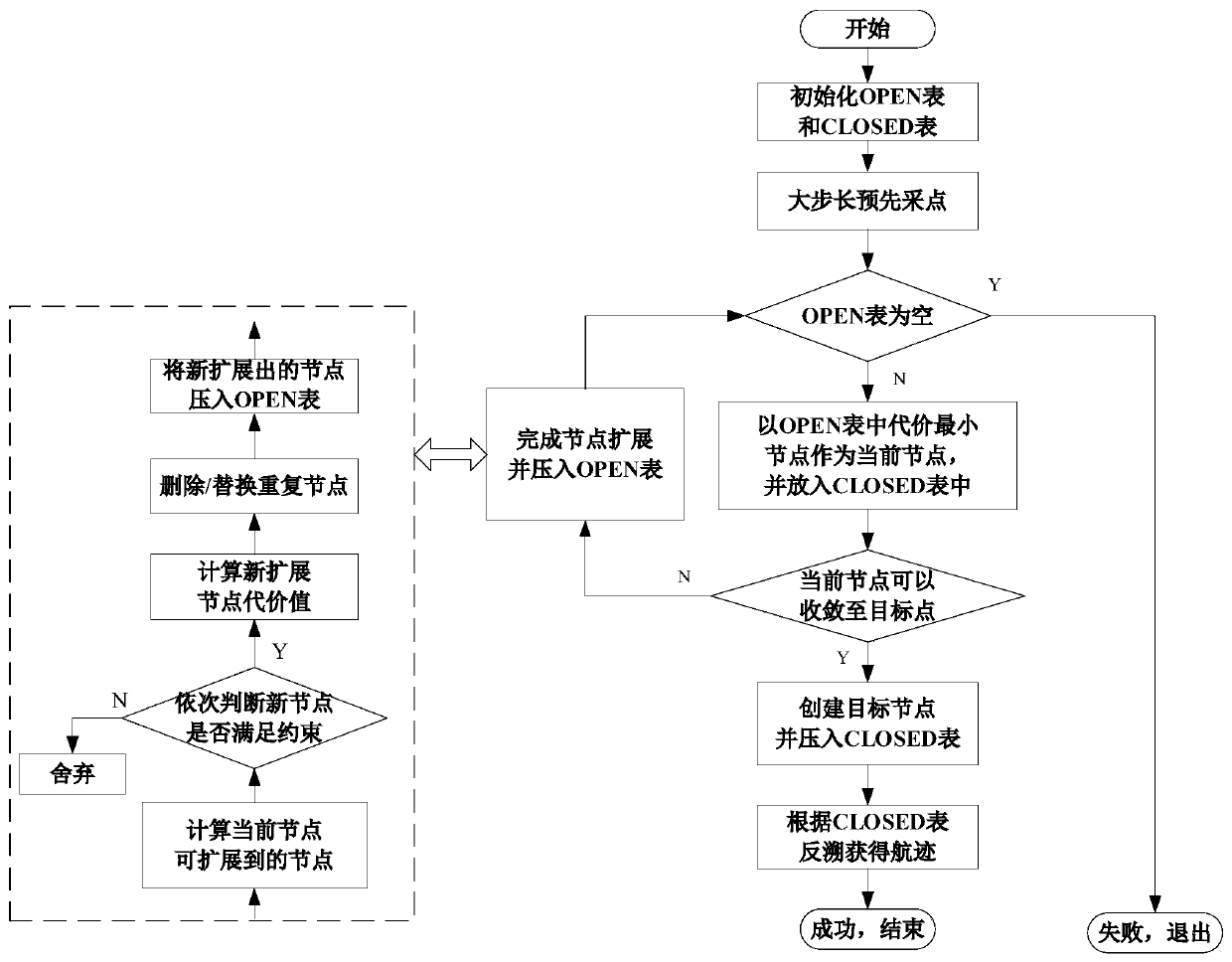
[0073] This embodiment discloses a UAV trajectory planning method considering the arrival time constraint, and the specific implementation steps are as follows:
[0074] Step 1: Obtain UAV flight performance parameter information, track constraint information and mission environment information.
[0075] Set the flying speed of the UAV to 35m / s, the maximum turning angle to 90°, and the minimum track segment length l min =1km. The starting point / end point of the drone and the position and radius of the no-fly zone in the mission environment are listed in Table 1. The designated range of the UAV is 9.60km, and the relative error limit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More