

Method for controlling movement trajectory of robotic fish group for floating object transportation
A motion trajectory and control method technology, applied in toys, dolls, entertainment and other directions, can solve the problems of lack of application-oriented robotic fish group cooperation technology, inability to accurately control the movement of transported objects according to the trajectory, etc. The effect of shortening delivery time and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0030] Specific implementation mode one: combine figure 2 , image 3 , Figure 4 , Figure 5 Describe this embodiment mode, a kind of data acquisition method used in wireless sensor network that this embodiment mode provides, specifically comprises the following steps:
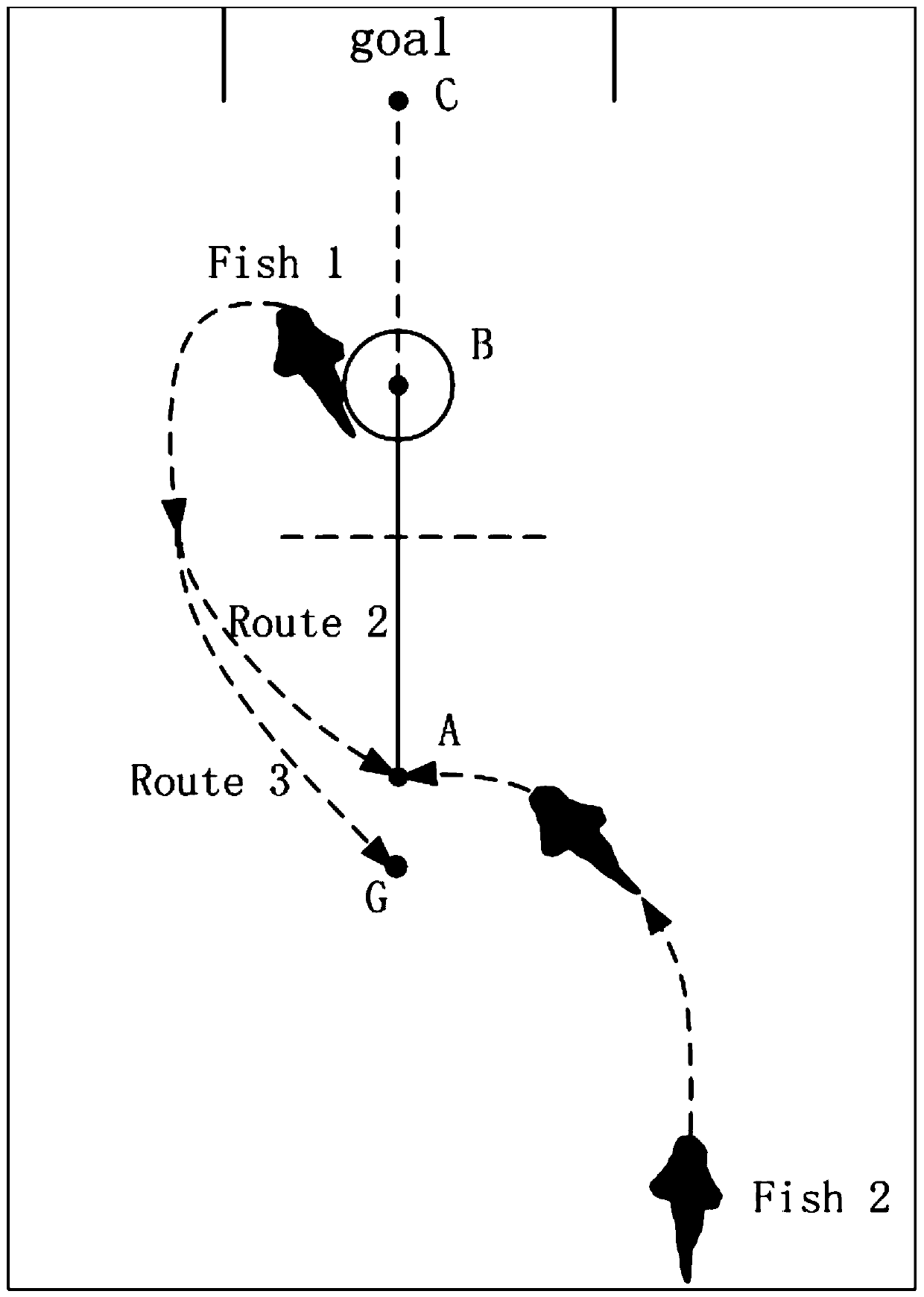
[0031] S1. On the extension line from the target position C to the position B of the object to be conveyed, set the distance d from the object to be conveyed 1 is the point to be hit A, let the distance to be transported be d 2 is the pre-impact point G; d 2 >d 1 ;d 1 It is longer than the length of a fish body; the positions of points A and G change with the change of B;
[0032]S2. Schedule one robot fish Fish1 in the robot fish group to move to point A, and the other robot fish Fish2 to move to point G; during the collision process, when the distance between the two fish and point A is close, the two fish may collide; For this reason, point G is set as the preliminary impact point; as figure 2 As...
specific Embodiment approach 2
[0055] Embodiment 2: This embodiment differs from Embodiment 1 in that in step S2, the fish that can reach point A the fastest in the robotic fish group is selected as Fish1.
[0056] Other steps and parameters are the same as those in the first embodiment.
specific Embodiment approach 3
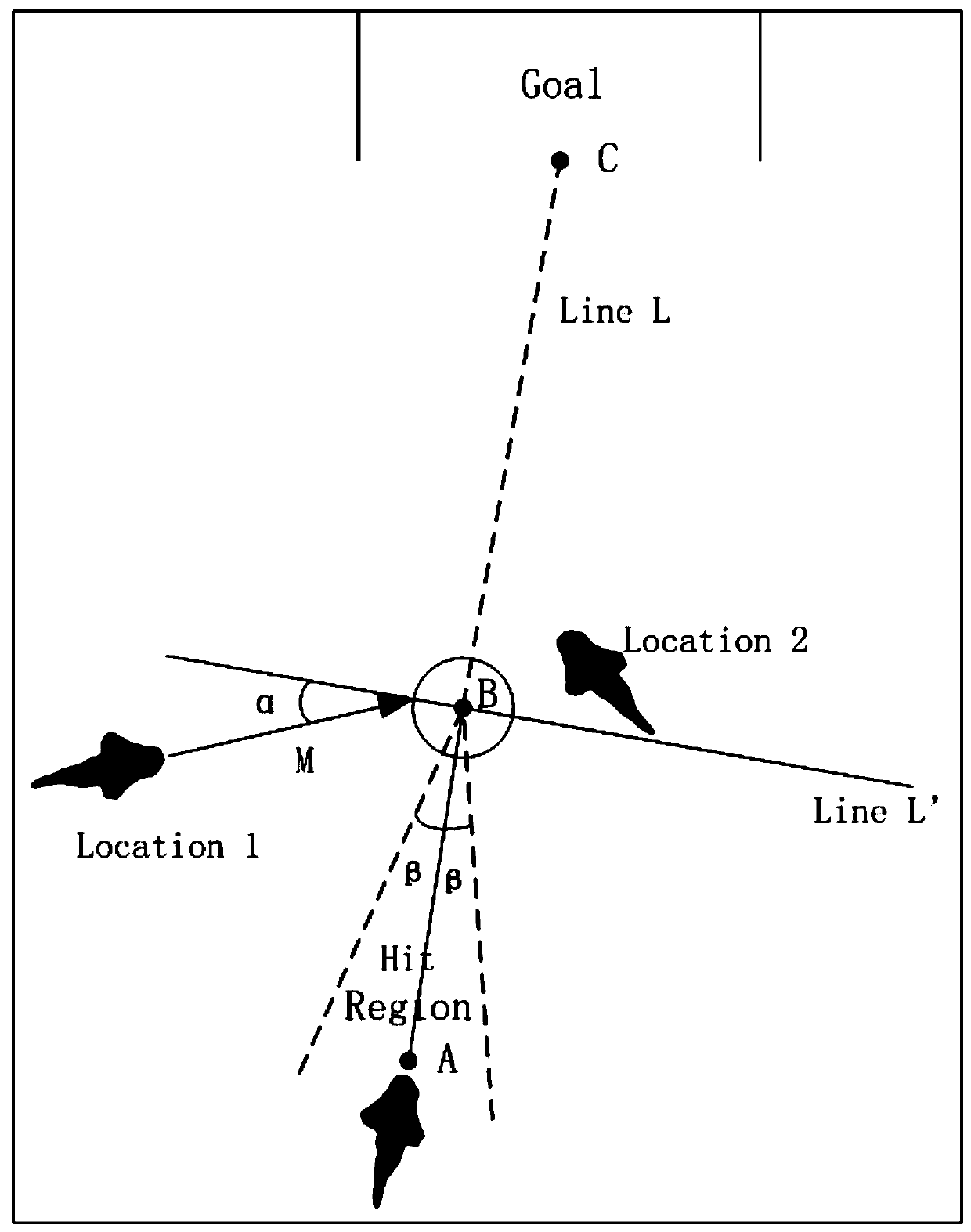
[0057] Specific Embodiment 3: The difference between this embodiment and specific embodiments 1 or 2 is that the point A to be hit is specifically centered on A and d 3 A circular area with radius; d 3 The calculation formula is:
[0058]
[0059] When encoding, because the system of collecting coordinates is not accurate, if only the coordinates of point A are given, it is difficult for the robot fish to reach point A, and it is easy to cause the situation of spinning around point A. It can be seen from the above that when the angle between the fish body direction M and Line L is less than β, the fish can hit the floating object and swim forward in the direction BC more accurately; therefore, in this embodiment, point A is the circular area, and only need It is enough that the circular area is in the Hit Region area; for example Figure 4 Shown, with DA (equal to d 3 ) is the radius, which is set as the area to be hit. The area to be hit is in the Hit Region area. When ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More