

A method and system for cooperative relative positioning of aircraft swarms
A relative positioning and aircraft technology, applied in the direction of instruments, navigation, measuring angles, etc., can solve the problem of not being able to achieve precise positioning of the same target, and achieve the requirements of simplifying the configuration of aircraft measuring equipment, high relative positioning accuracy, and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
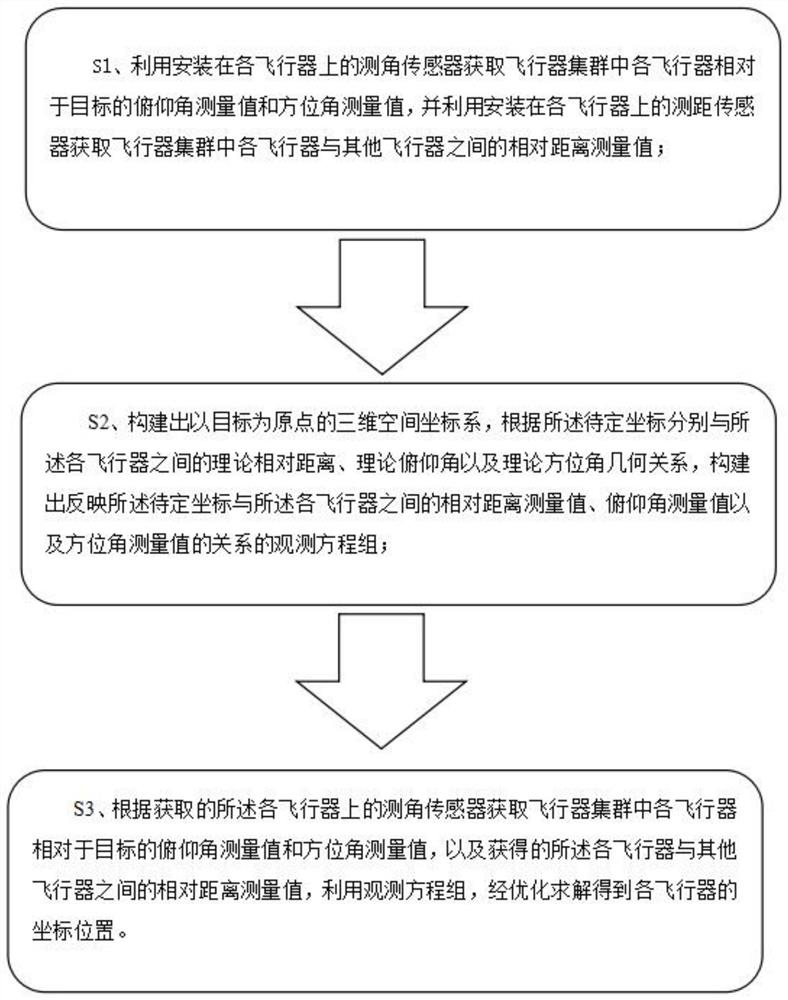
[0088] like figure 1 As shown, the present invention discloses a cooperative relative positioning method for an aircraft cluster, comprising the following steps:
[0089] S1. Use the angle measuring sensor installed on each aircraft to obtain the pitch angle measurement value and azimuth angle measurement value of each aircraft in the aircraft cluster relative to the target, and use the ranging sensor installed on each aircraft to obtain the distance between each aircraft in the aircraft cluster. relative distance measurements between other aircraft;
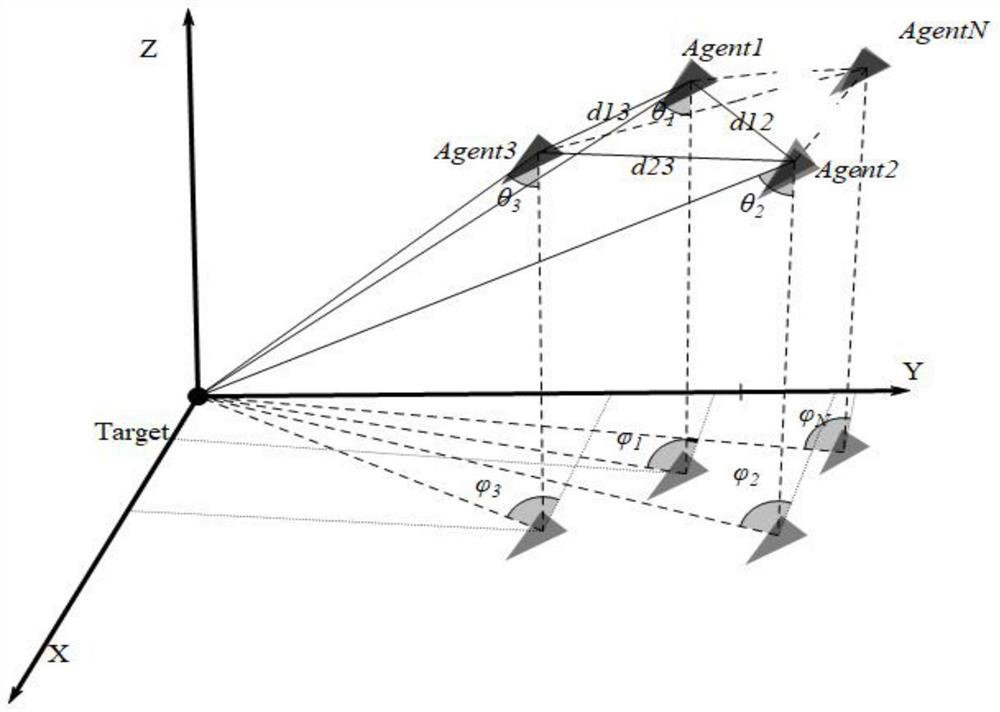
[0090] S2. Construct a three-dimensional space coordinate system with the target as the origin. According to the theoretical relative distance, theoretical pitch angle and theoretical azimuth angle between the undetermined coordinates and the respective aircraft, construct a structure reflecting the undetermined coordinates and the said aircraft. A set of observation equations for the relationship between the relative distance ...
Embodiment 2
[0095] 1. A method for cooperative relative positioning of an aircraft cluster, comprising the following steps:
[0096] S1. Use the angle measuring sensor installed on each aircraft to obtain the pitch angle measurement value and azimuth angle measurement value of each aircraft in the aircraft cluster relative to the target, and use the ranging sensor installed on each aircraft to obtain the distance between each aircraft in the aircraft cluster. relative distance measurements between other aircraft;
[0097] S2. Construct a three-dimensional space coordinate system with the target as the origin. According to the theoretical relative distance, theoretical pitch angle and theoretical azimuth angle between the to-be-determined coordinates and the respective aircrafts, construct a geometric relationship that reflects the to-be-determined coordinates and the theoretical azimuth angle. A set of observation equations for the relationship between the relative distance measurements, ...
Embodiment 3
[0117] A cooperative relative positioning method for an aircraft cluster, comprising the following steps:
[0118] S1. Use the angle measuring sensor installed on each aircraft to obtain the pitch angle measurement value and azimuth angle measurement value of each aircraft in the aircraft cluster relative to the target, and use the ranging sensor installed on each aircraft to obtain the distance between each aircraft in the aircraft cluster. relative distance measurements between other aircraft;
[0119] S2. Construct a three-dimensional space coordinate system with the target as the origin. According to the theoretical relative distance, theoretical pitch angle, and theoretical azimuth angle between the to-be-determined coordinates and the respective aircraft, construct a system that reflects the undetermined coordinates and the theoretical azimuth. A set of observation equations for the relationship between the relative distance measurements, the pitch angle measurements, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More