

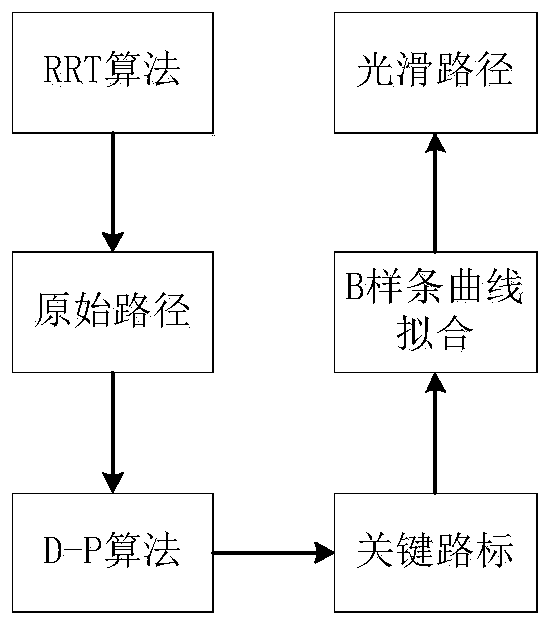
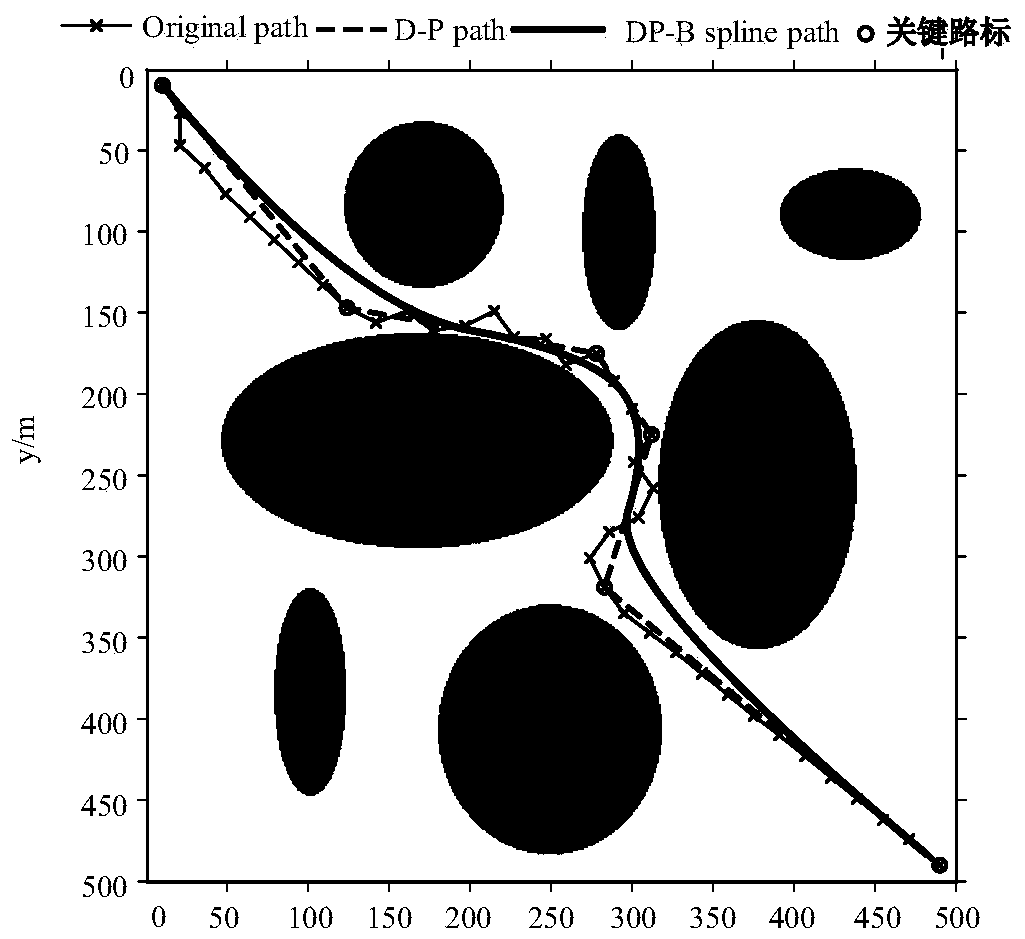
Rapidly-exploring random tree path smoothing method
A random tree and path technology, applied to road network navigators, navigation, instruments, etc., can solve problems such as detours, shortened path length, and many path turns, achieving obvious effects, shortened path length, and improved smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In conjunction with the accompanying drawings, the specific implementation steps of the present invention are described in detail as follows:
[0037] 1) Given a map of the environment where the robot is located, read the environment map, convert the map matrix to a binary value, and generate a two-dimensional integer array with values of 0 and 1, where 0 represents a passable point and 1 represents an obstacle point.
[0038] 2) The starting node q of the given robot start with the target node q goal , judge the given start node q start and the target node q goal Whether the value of the coordinate value in the two-dimensional integer array map has 1, if it is not 1, go to step 3); if there is 1, then re-enter the starting node or the target node;
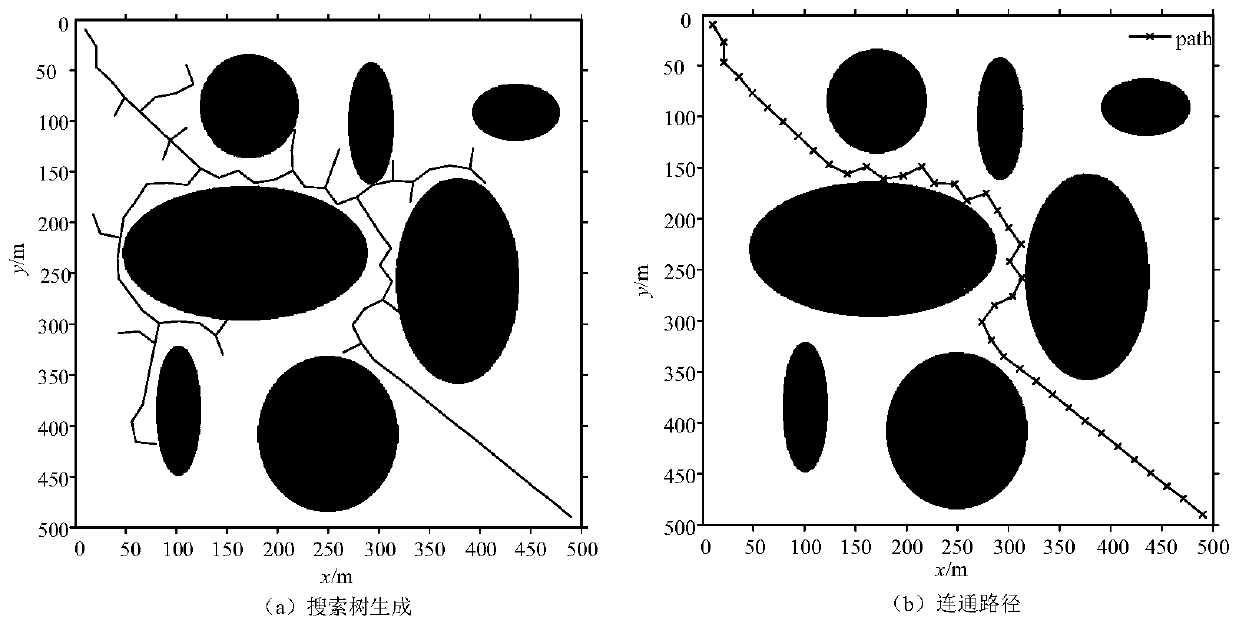
[0039] 3) Start with node q start As the root node of the rapidly expanding random tree spanning tree, build a random tree T 1 ;
[0040] 4) in the map q start Nearby randomly selects a sampling point q based on pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More