

Lane changing decision-making method and system for autonomous vehicle based on rolling game
A decision-making method, a technology for autonomous driving, applied in the direction of road vehicle traffic control system, traffic control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
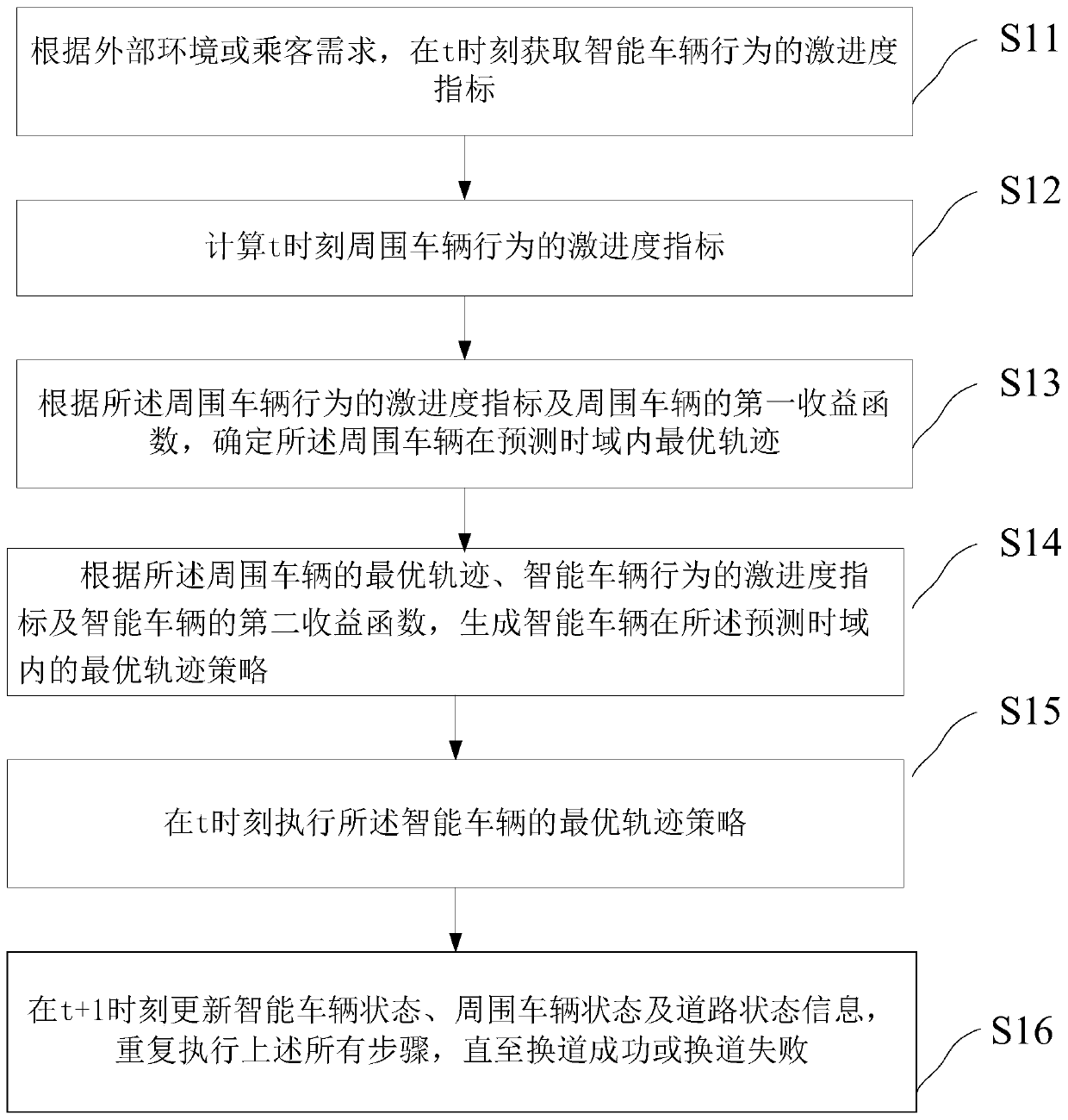
[0102] Step 1: According to the external environment information or the driver (passenger) demand, give the smart car an indicator of the driving aggressiveness at the current moment. For example, the total index set is A={F, M, ε}, where F represents passing through the current forecast time domain in a more aggressive manner, M represents passing through the current forecast time domain in a gentle manner, and ε represents conservative Through the current prediction time domain, if there is no mandatory external input, the default driving aggressiveness is M.
[0103] Step 2: Output the surrounding vehicles and other information, and infer the aggressiveness of the surrounding vehicles. Among them, the guessing algorithm is a Bayesian network. The method of dynamic Bayesian network is used to predict the degree of aggressiveness, and the inherent probability framework can effectively deal with the uncertainty in the prediction process. The features used in the prediction n...
Embodiment 2
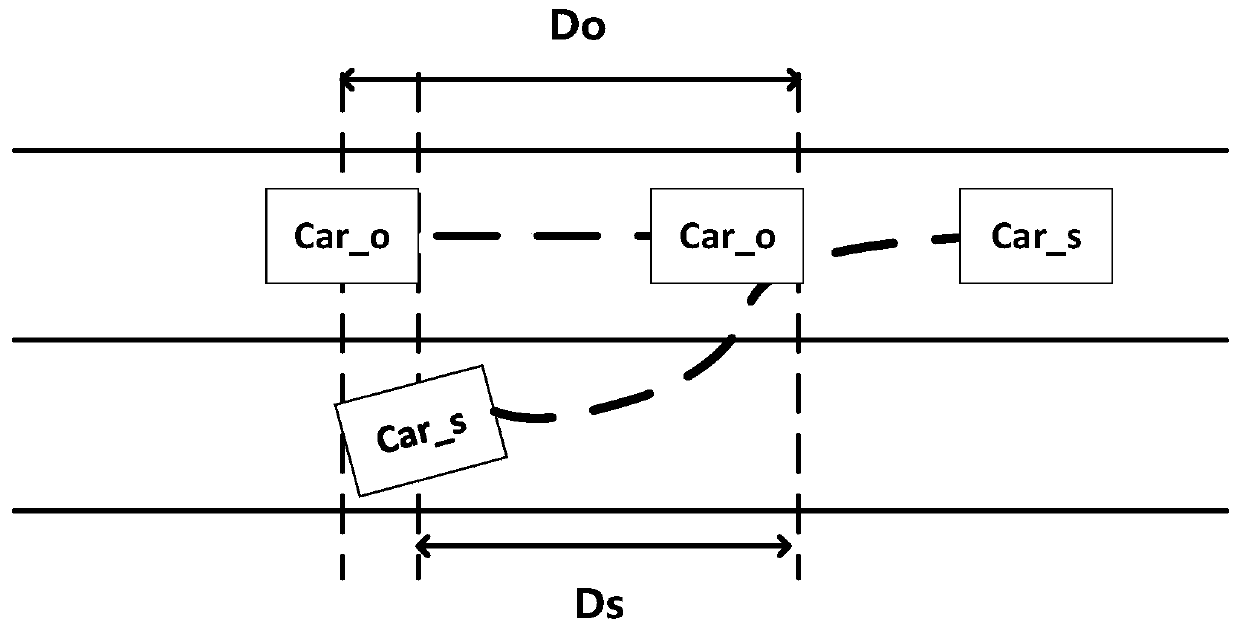
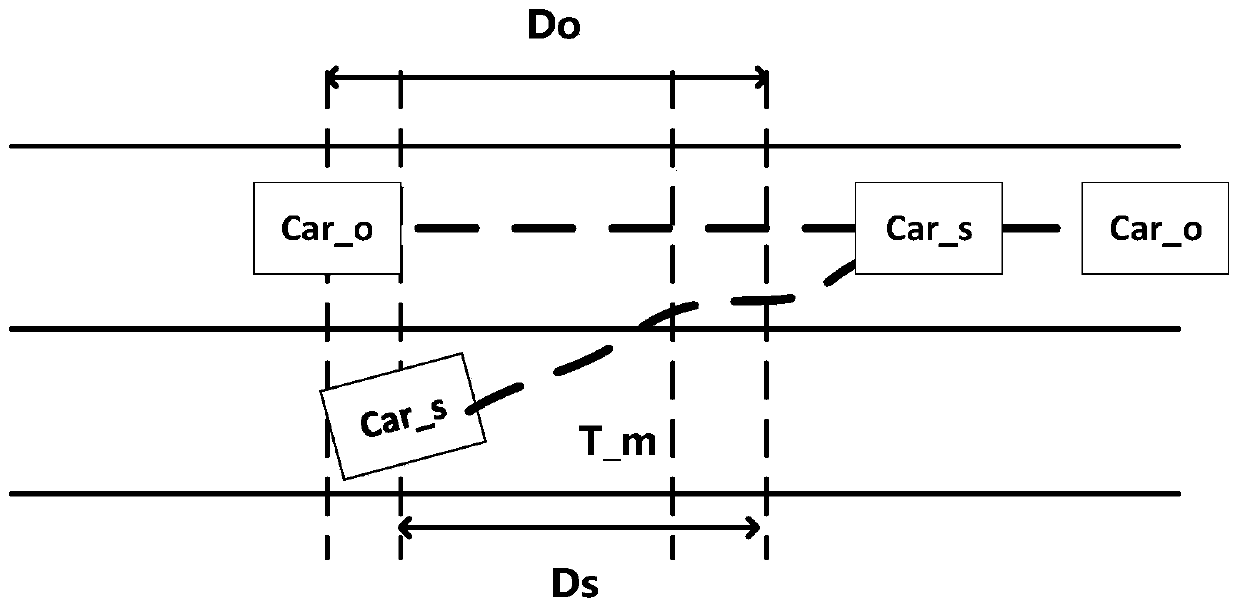
[0149] An illustrative working condition such as image 3 shown:
[0150] Car_s is an intelligent vehicle, Car_o is a surrounding vehicle, and the aggressiveness of Car_s and Car_o is the same. The smart vehicle is doing lane changing operations, while the surrounding vehicles are doing lane keeping operations.
[0151] At time t, the intelligent vehicle Car_s predicts that the longitudinal displacement required to complete the lane-changing operation is Ds, and the surrounding vehicle Car_o predicts that the displacement of the longitudinal coordinates from the current moment to the completion of the intelligent vehicle's lane-changing operation is Do.
[0152] First, the intelligent vehicle estimates the aggressiveness of the surrounding vehicles online through the dynamic Bayesian network to be the same as itself. The model used by the intelligent vehicle to predict the lane keeping of the surrounding vehicles is:
[0153]
[0154] in is the acceleration of the surro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More