

Modeling method for telescopic vibration characteristics of arm support of straight arm type aerial work platform
A technology of an aerial work platform and a modeling method, which is applied to the modeling field of telescopic vibration characteristics of a boom of a straight arm aerial work platform, can solve problems such as calculation errors, and achieve the effect of improving calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and example the present invention will be further described. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present invention.
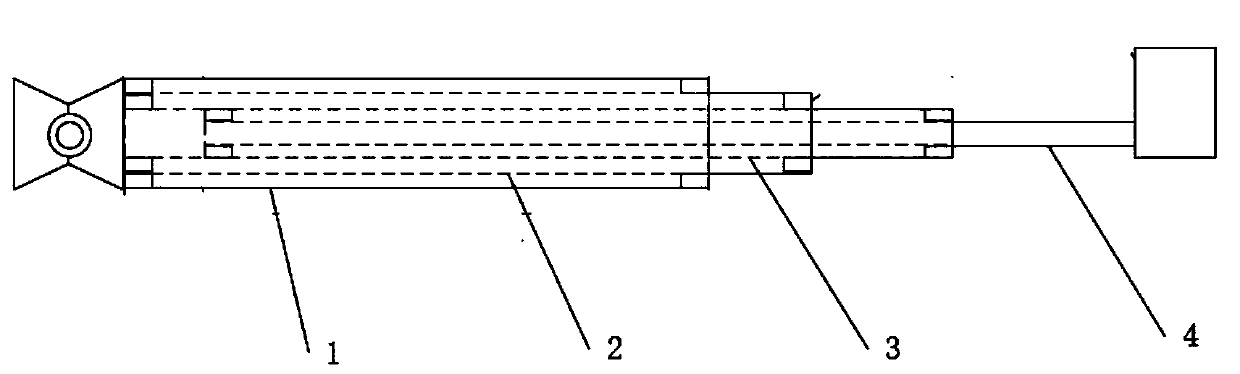
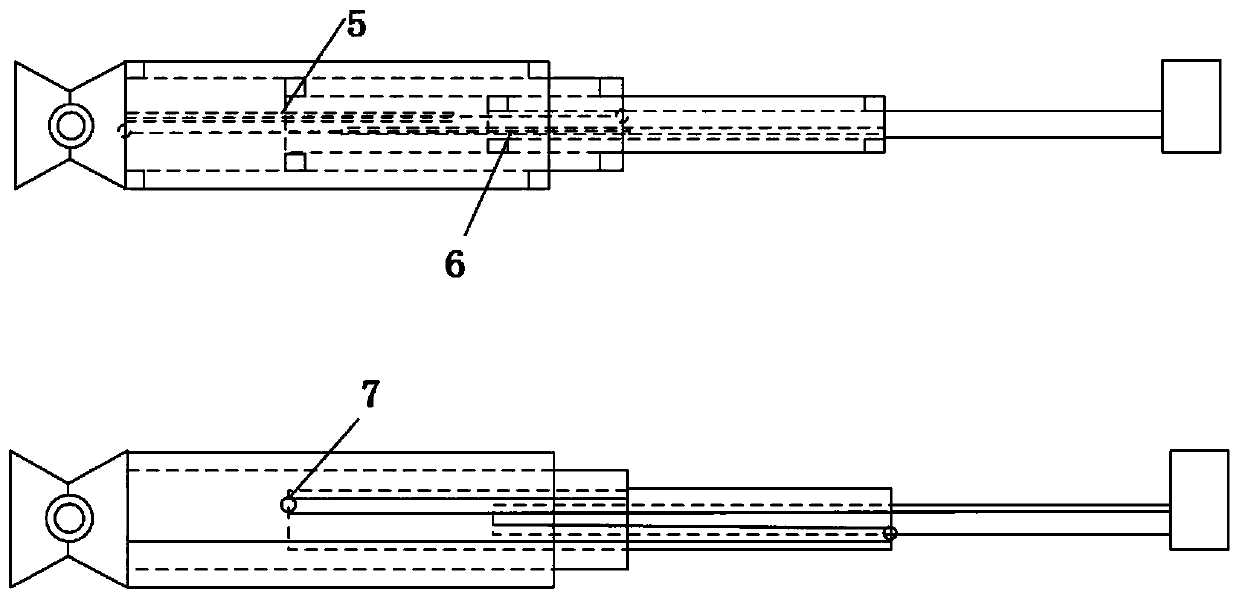
[0053] Step 1: Re-segment the boom according to the combination of boom sections, and calculate the relationship between the length and time of each boom section and the basic parameters of the boom section, such as: speed, acceleration, linear density, bending stiffness, etc.
[0054] The present invention takes a 35.35m straight-arm type aerial work platform boom horizontal extension as an example, and the basic parameters of the boom are shown in Table 1.
[0055] Table 1 Basic parameters of boom
[0056]
[0057]
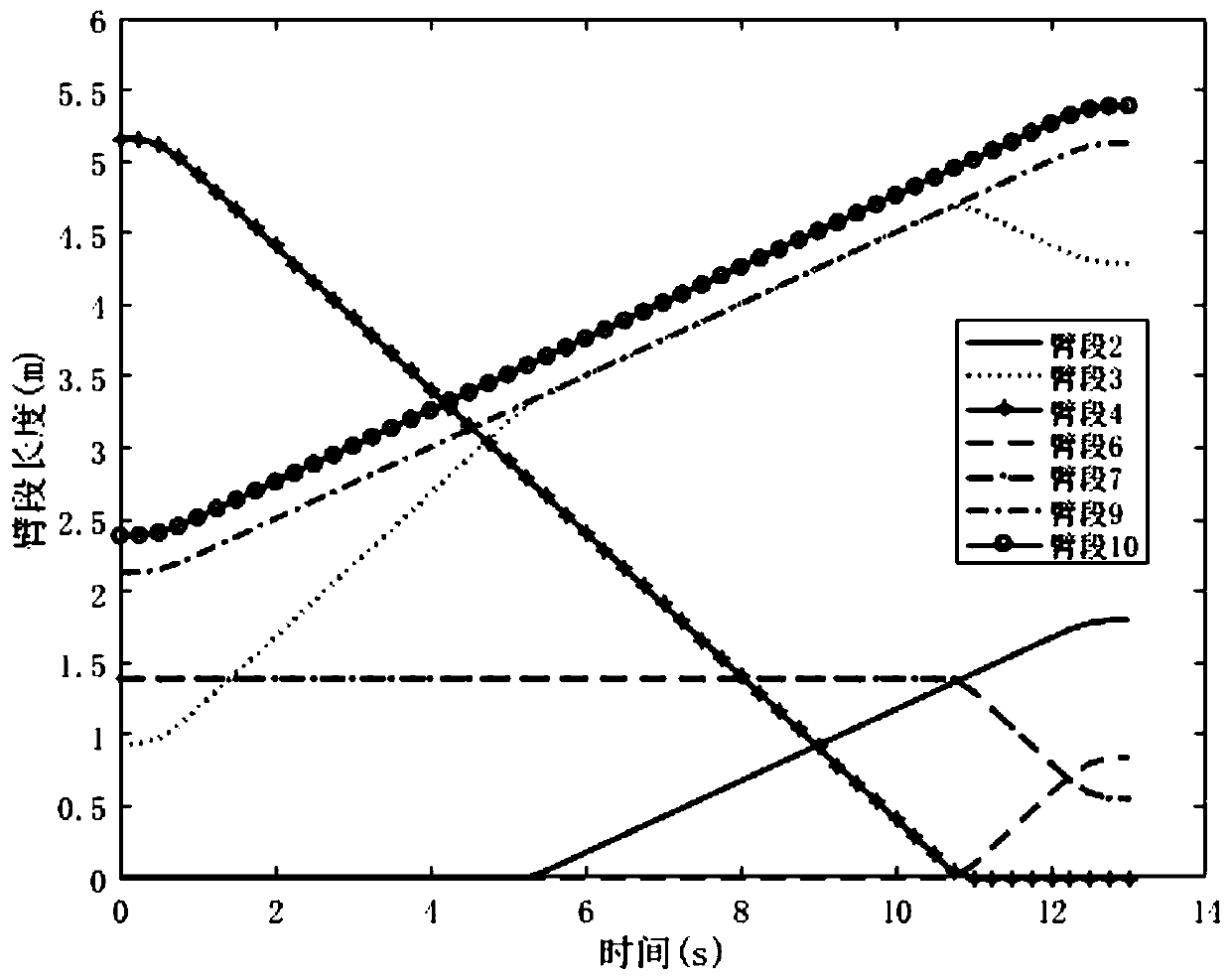
[0058] The total length of the boom is 15.34m in the fully retracted state. To prevent overturning, the maximum allowable horizontal length is 21.34m. The moment b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More