

Multi-unmanned aerial vehicle time-varying formation control method based on synchronization strategy
A multi-UAV and control method technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the problems that cannot be directly applied to time-varying formations and cannot meet actual requirements, and achieve reduction The effect of coupling and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
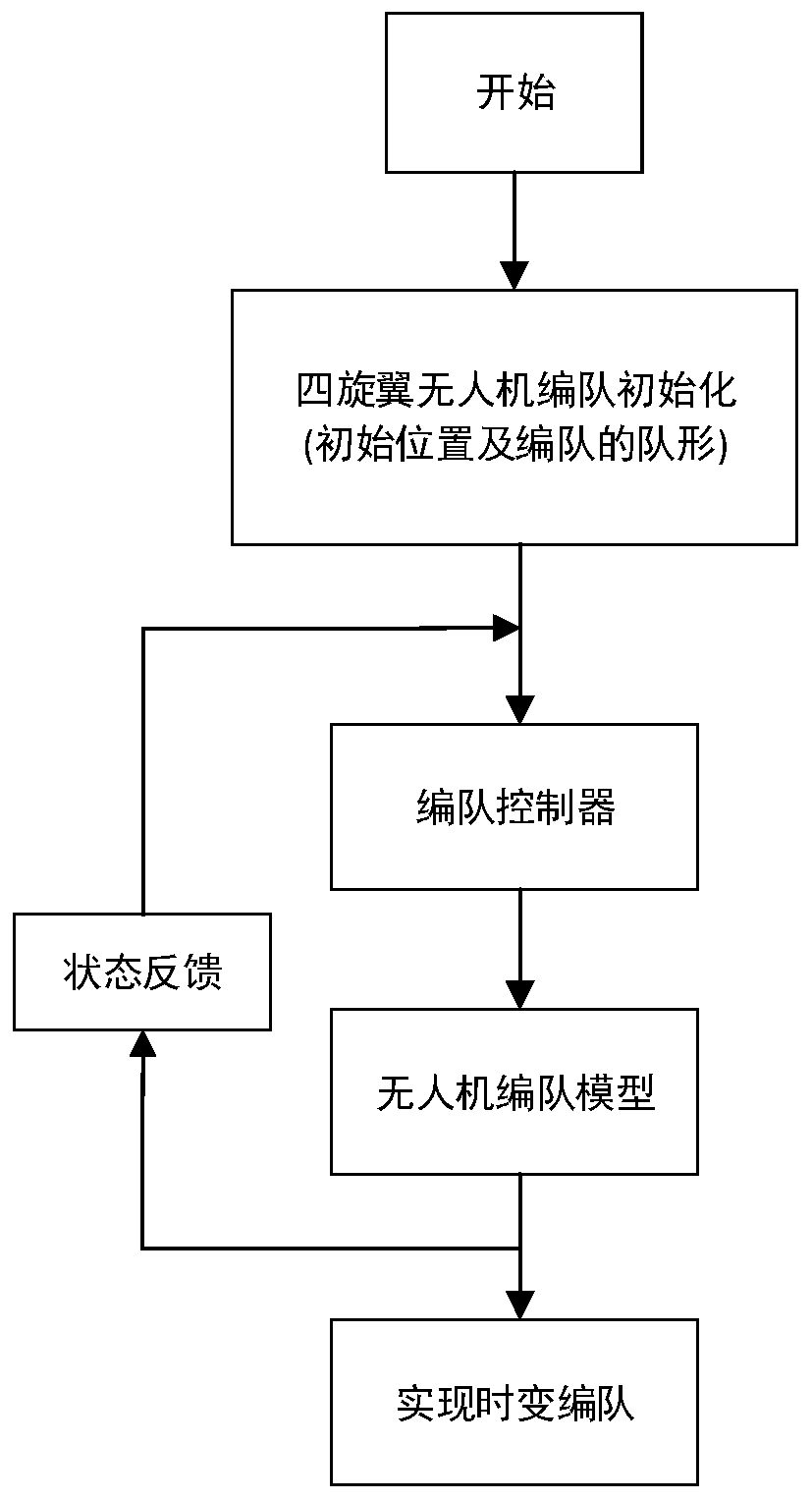
[0032] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
[0033] For the mathematical model of the UAV formation in the three-dimensional space, the mathematical model is described by an ellipsoid equation with time-varying parameters, as follows:
[0034]
[0035] In order to realize the time-varying change of the formation formation in three-dimensional space, the ellipsoid equation needs to be written in the form of a parameter equation:
[0036]
[0037] Further write the above formula in the form of a matrix to obtain the final form used to describe the formation formation:
[0038]
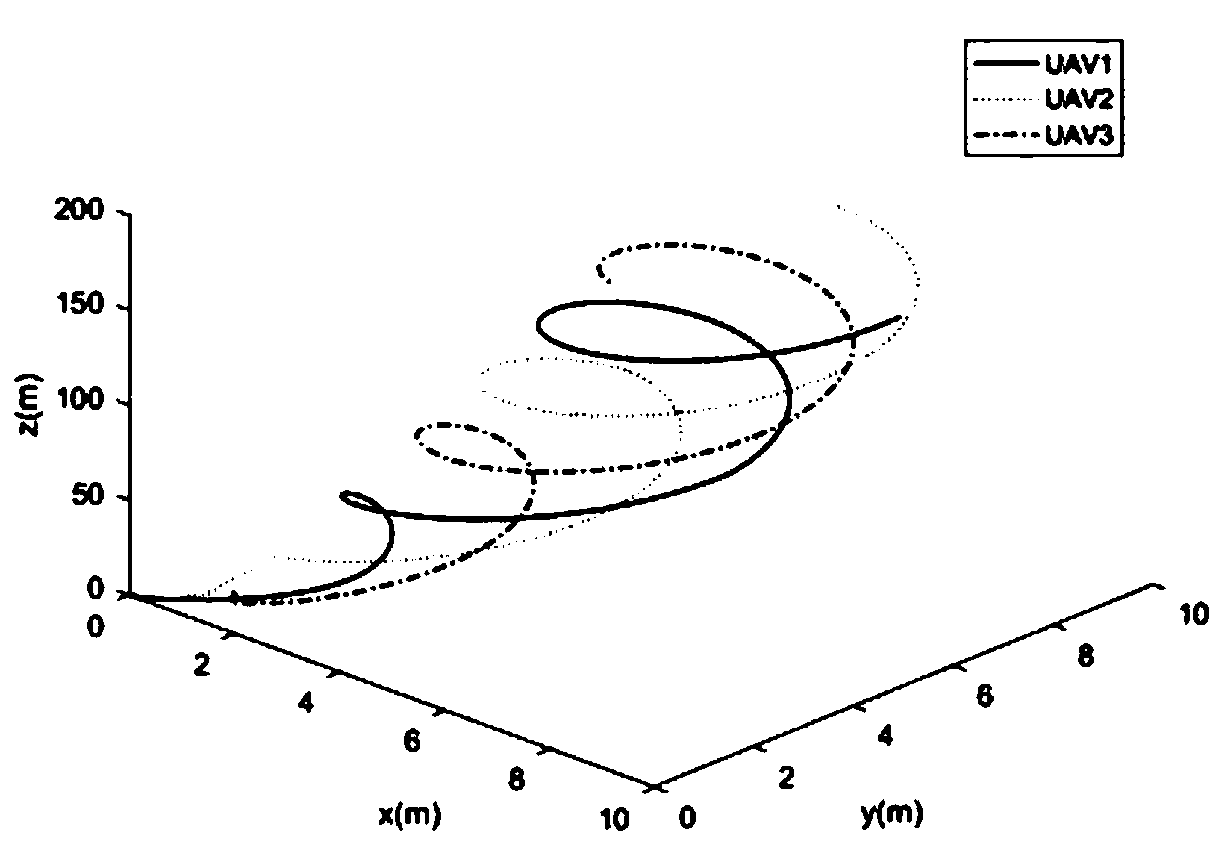
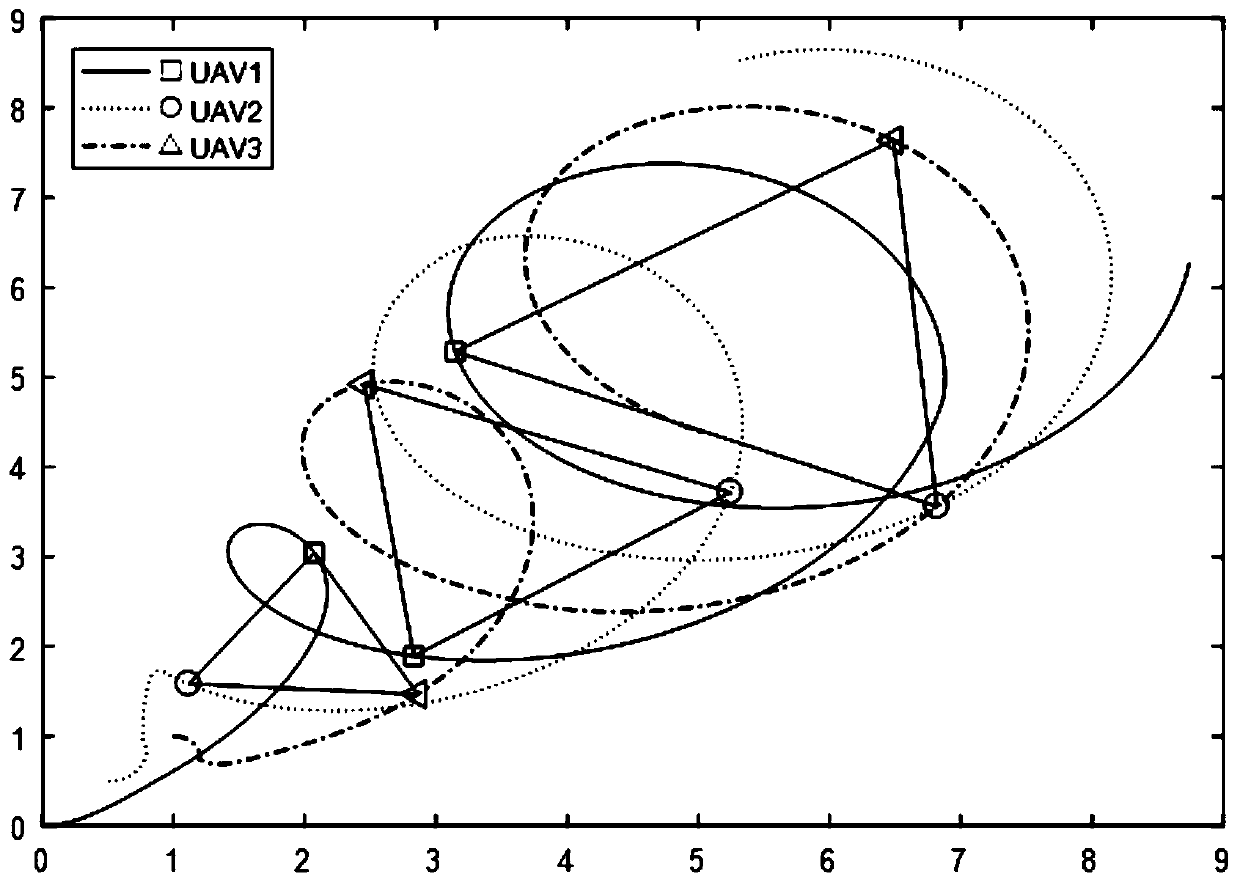
[0039] In an embodiment, the present invention uses three quadrotor UAVs to form a formation (i=1, 2, 3), and the three UAVs are located...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More