

Method for implementing arbitrary linear controller by using active disturbance rejection control structure
A technology of active disturbance rejection control and linear controller, applied in the field of control theory and application, can solve the problem of lack of arbitrary linear controller, etc., and achieve the effect of simple and reliable control system
Active Publication Date: 2019-10-11
NORTH CHINA ELECTRIC POWER UNIV (BAODING)
View PDF3 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
At present, it is unknown which objects the ADRC structure is suitable for, and there is still a lack of a method for implementing an arbitrary linear controller using the ADRC structure
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0123] The given controller is:
[0124]
[0125] Through the steps described in S2 and S3, take b 0 = 1 to get the LADRC controller parameter as:
[0126] K 0 =[-0.0711 -0.4564 0.6226 0.0385],
[0127] L o =[1.7129 3.8064 2.9587 2.0458].
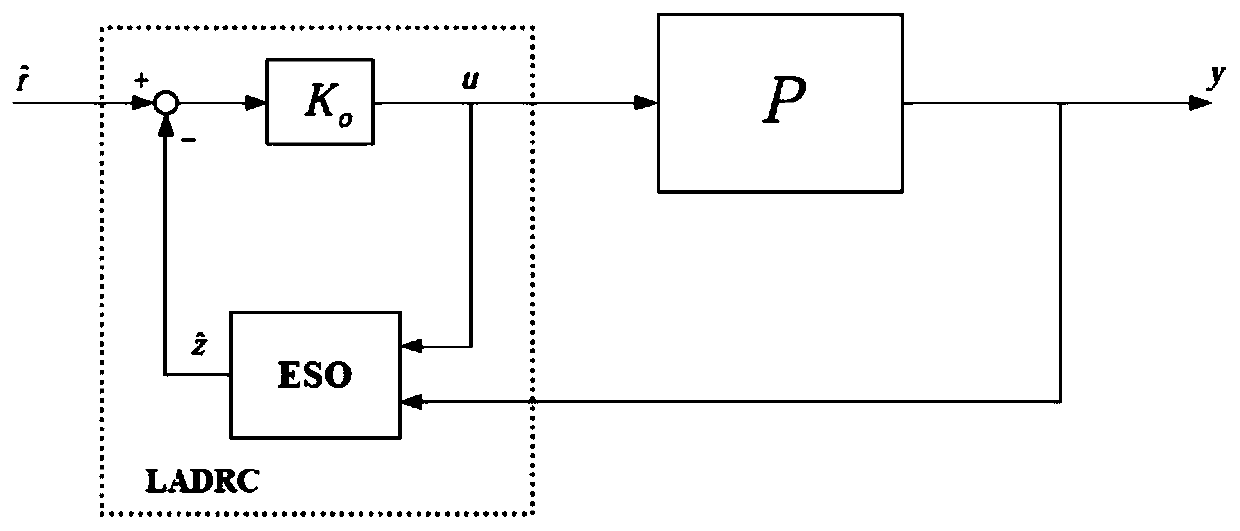
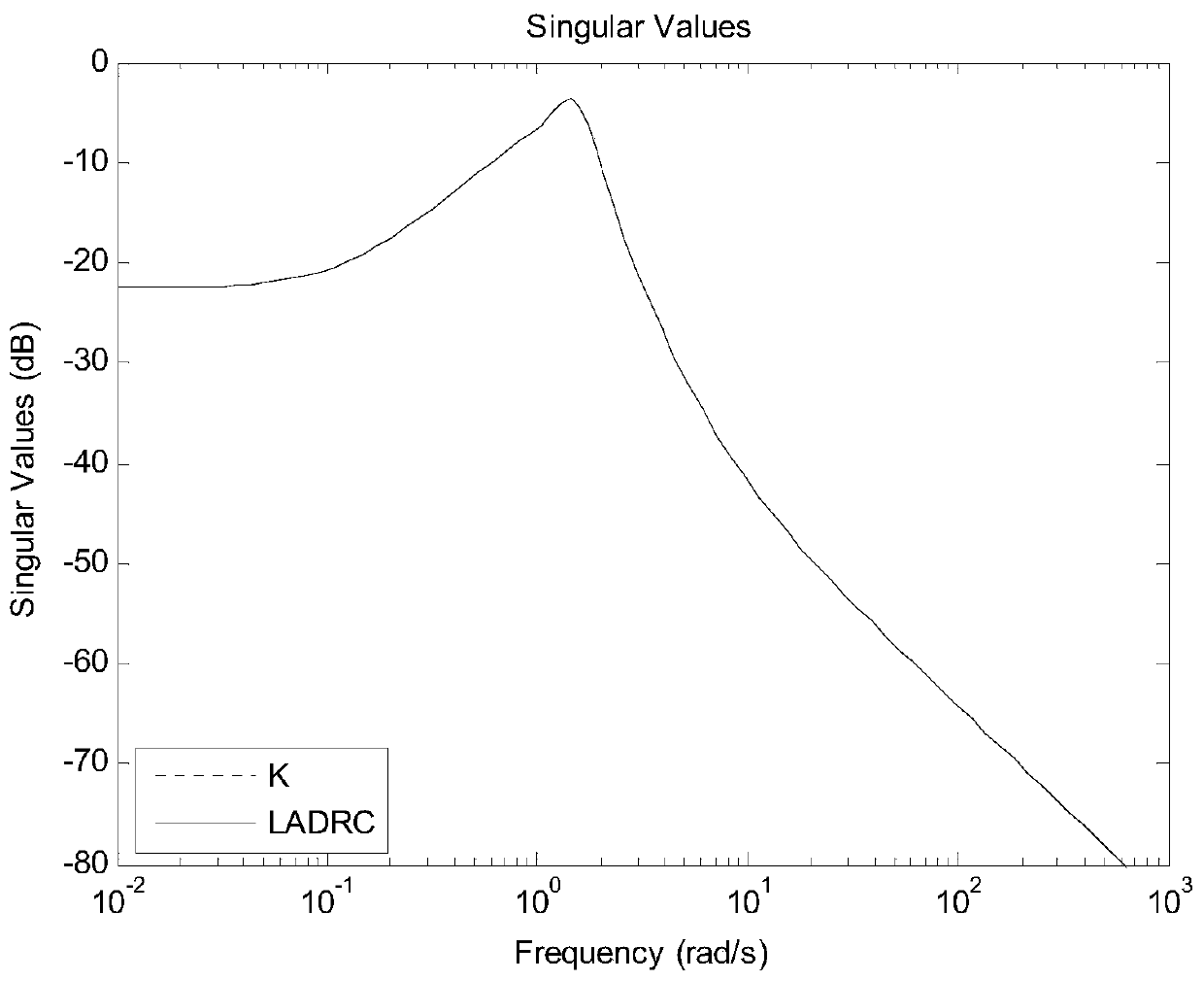
[0128] pass figure 2 , gives the frequency response curves of LADRC and a given controller K, and it can be seen that the two are completely coincident. so pass figure 1 The structure shown controls the actual controlled object, and can get the same anti-disturbance performance as K.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention provides a method for implementing arbitrary linear controller by using an active disturbance rejection control structure. According to the method, under the premise of a known strict regular controller K, linear transformation is introduced to describe the controller K and a conventional LADRC controller in a state space to obtain an asymmetric Riccati equation between the parameters of the two controllers, the asymmetric Riccati equation is solved to obtain an adjustable LADRC controller with the same anti-interference and robust performance as the controller K, and online adjustment is performed on the adjustable LADRC controller to obtain ideal control performance. According to the method provided by the invention, the control of the arbitrary linear controller is achieved by using the active disturbance rejection control structure, so that the control system is simple and reliable; and based on the linear system theory, and under the state space description of the control theory, the implementation of the corresponding LADRC is obtained through a linear transformation manner, which is more accepted by engineering designers.
Description
technical field [0001] The invention belongs to the field of control theory and application technology, and in particular relates to a method for realizing an arbitrary linear controller by adopting an active disturbance rejection control structure. Background technique [0002] Active Disturbance Rejection Control (ADRC for short) is a general-purpose control technology proposed by researcher Han Jingqing of the Institute of Systems, Chinese Academy of Sciences. Fast speed, high precision, strong anti-interference ability and other advantages have gained more and more attention. The most essential function of ADRC is the ability to estimate and compensate disturbances. It is mainly composed of four parts: tracking differentiator (tracking differentiator, TD), extended state observer (extended state observer, ESO) and nonlinear feedback (nonlinear state error feedback). , NLSEF), its core idea is to take the internal uncertainty of the system (steady or time-varying, linear...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05B11/42
CPCG05B11/42
Inventor谭文傅彩芬
OwnerNORTH CHINA ELECTRIC POWER UNIV (BAODING)