

Man-machine interaction coordination control strategy based on multi-model predictive control
A technology of model predictive control and human-computer interaction, applied in computer parts, character and pattern recognition, computer-aided design, etc., can solve problems such as complex automatic driving control, strong time-varying parameters, and inability of MPC to adapt
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0043] The present invention will be described in detail below with reference to the accompanying drawings and examples.
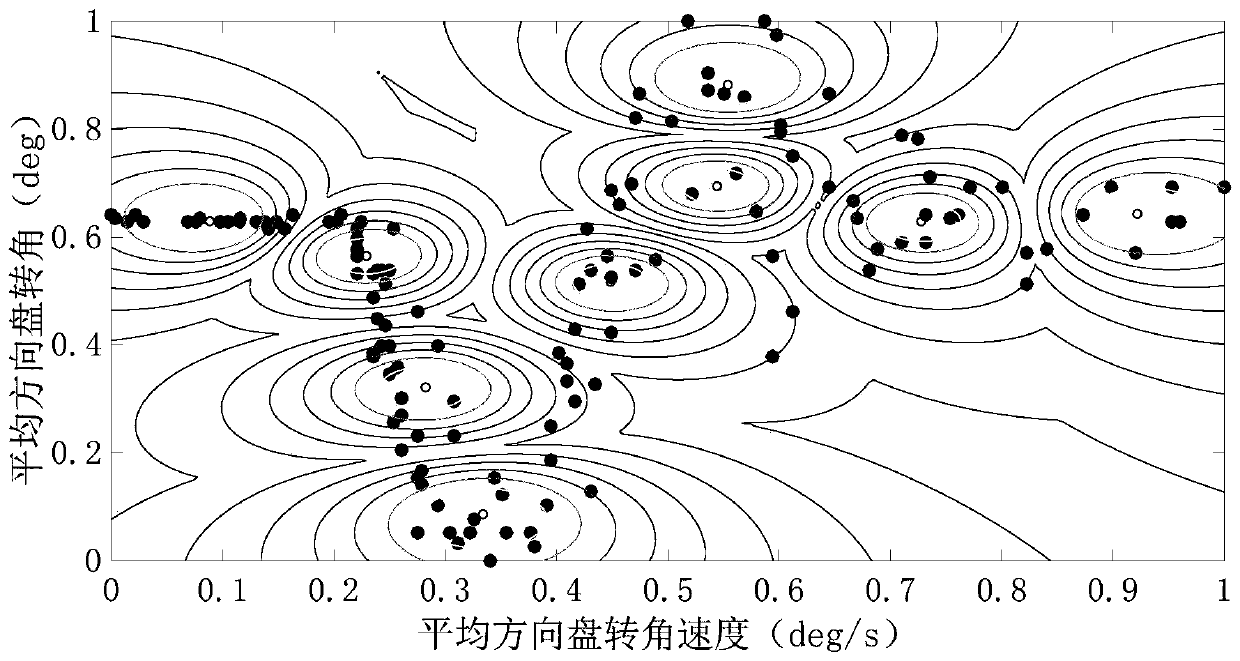
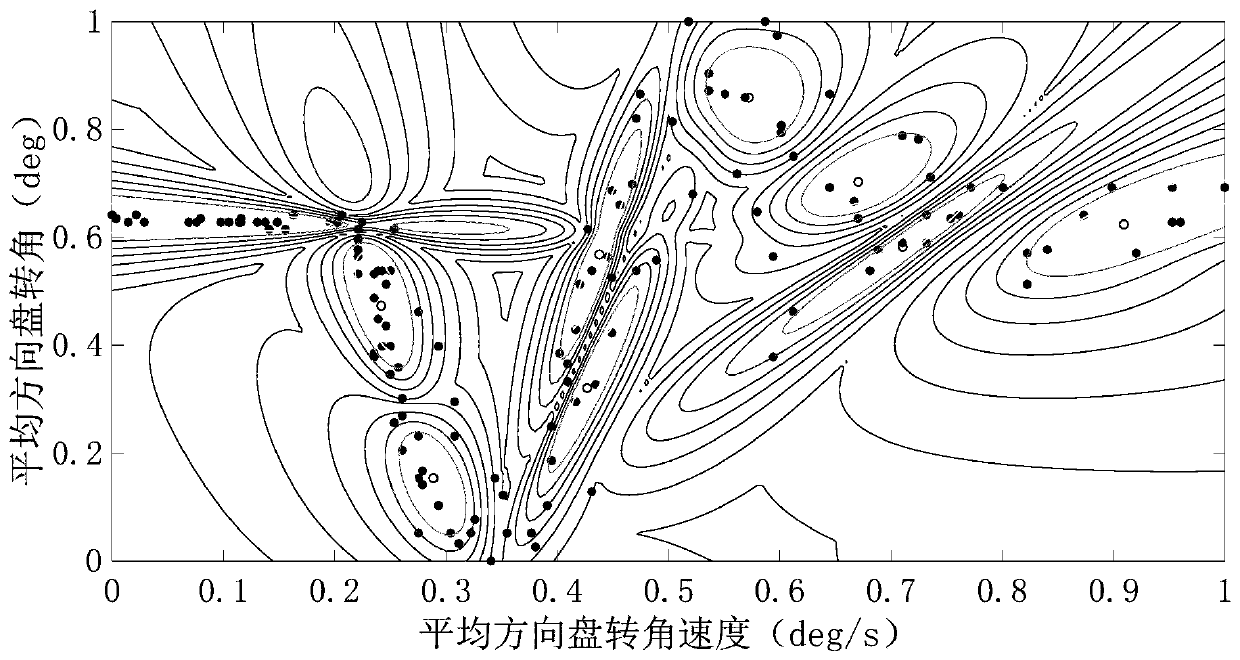
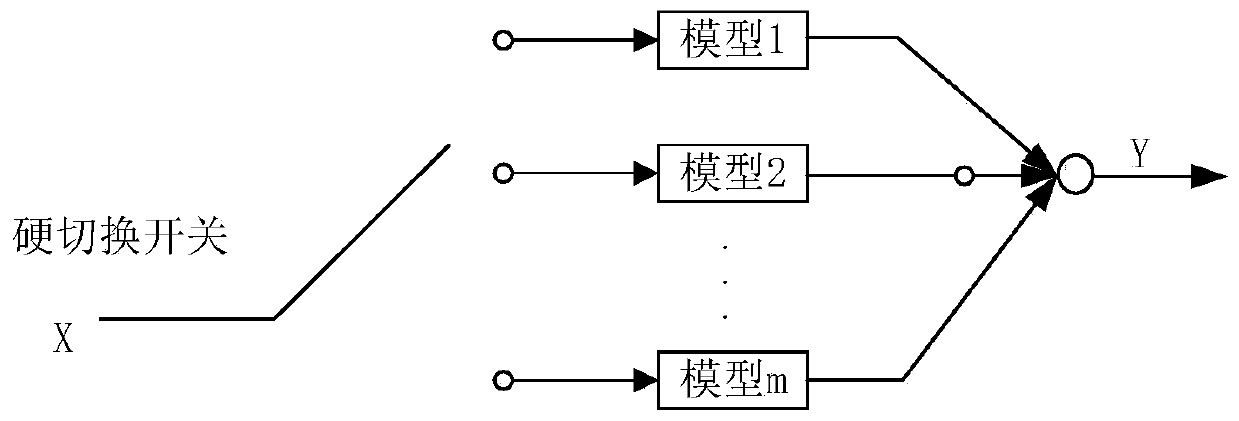
[0044] In order to solve the problems that cannot be solved by the traditional MPC automatic driving control under complex and multi-working conditions, the present invention proposes a new multi-model predictive control (MMPC) algorithm, and applies it to the intelligent car driver. machine cooperative control system. The Gustafson-Kessel (GK) algorithm is used to cluster and analyze the real vehicle test data to obtain the cluster center and training sample data of each typical steering condition; The structure is built, and the established sub-models of each category are used as the prediction model of the MPC algorithm; the objective function of the multi-objective optimization is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More