

Feature matching method based on depth re-projection and space consistency
A feature matching and reprojection technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve problems such as unreliable RANSAC results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
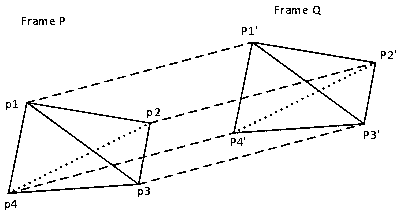
[0058] The present invention provides a method based on depth reprojection and spatial consistency feature matching, which improves the accuracy and robustness of feature matching by using the spatial consistency of feature points to more reliably extract the correspondence between frames.
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail in conjunction with the accompanying drawings.
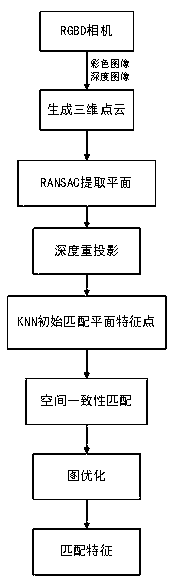
[0060] figure 1 It is a flow chart of the method of the present invention. Such as figure 1 As shown, the feature matching method based on depth reprojection and spatial consistency proposed by the present invention includes the following steps:
[0061] Step 1: Use the RGBD camera to obtain the color map and depth map in the scene, use the RANSAC ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More