

Particle filtering-based SLAM optimization method
A technology of particle filtering and optimization method, applied in two-dimensional position/channel control, non-electric variable control, instrument and other directions, which can solve the problems of robot noise interference and robot task failure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0061] The object of the present invention is to provide a kind of SLAM optimization method based on particle filter, solves the problem that the robot receives noise interference when performing a task and causes the robot to perform a task failure.
[0062] name resolution;
[0063] SLAM (simultaneous localization and mapping), also known as CML (ConcurrentMapping and Localization), real-time robot positioning and map construction, or concurrent mapping and positioning. The problem can be described as: put a robot in an unknown position in an unknown environment, is there a way for the robot to gradually draw a complete map of the environment while moving? corner.
[0064] A particle filter-based SLAM optimization method, at least including the following steps;
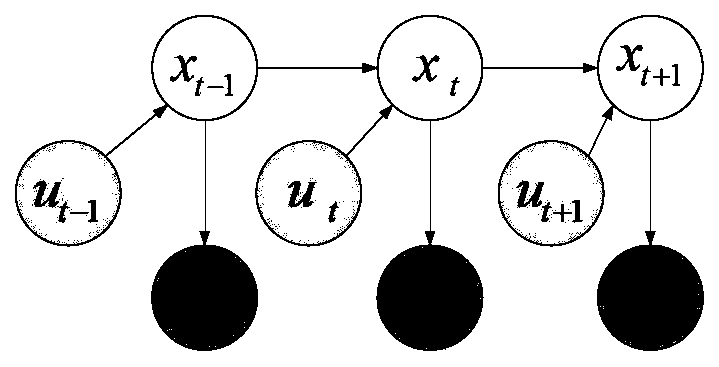
[0065] Step 1, establishes probability model to robot, described establishment probability model comprises motion probabilistic modeling, sensor observation model establishment and grid map model establishment;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More