

Path edge recognition method and system for a crane metal structure climbing robot
A technology of metal structures and robots, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problem of low recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
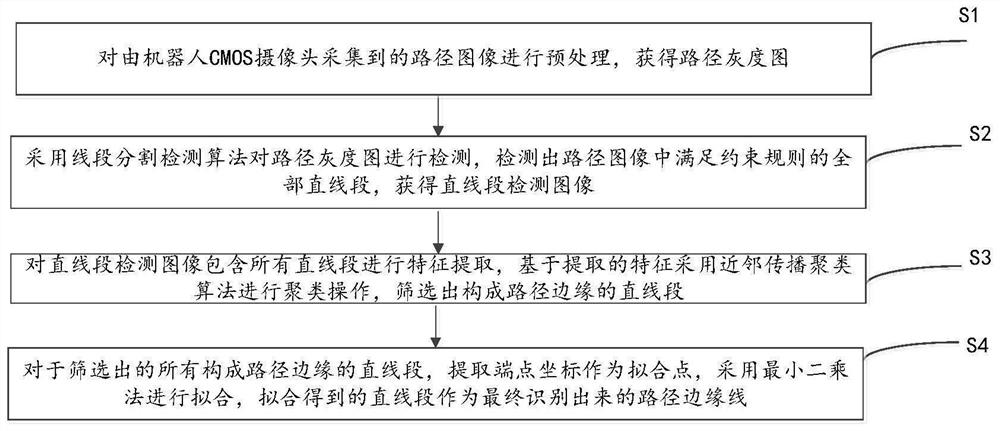
[0084] This embodiment provides a path edge recognition method for a crane metal structure climbing robot, please refer to figure 1 , the method includes:
[0085] Step S1: Preprocessing the path image collected by the robot CMOS camera to obtain a grayscale image of the path.
[0086] Specifically, the camera carried by the climbing robot used to lift heavy metal structures can acquire path images, and then preprocess the acquired images to facilitate the identification of subsequent path edges.
[0087] Step S2: Use the line segmentation detection algorithm to detect the path grayscale image, detect all the straight line segments satisfying the constraint rules in the path image, and obtain the straight line segment detection image.
[0088] Specifically, the line segmentation detection algorithm is the straight line segment detection algorithm LSD. The present invention adopts the improved line segment detection algorithm, sets the constraint rules in advance, and then use...
Embodiment 2
[0162] This embodiment provides a path edge recognition system for a crane metal structure climbing robot, please refer to Figure 8 , the system consists of:
[0163] The preprocessing module 201 is used to preprocess the path image collected by the robot CMOS camera to obtain a path grayscale image;
[0164] The line segmentation detection module 202 is used to detect the grayscale image of the path by using the line segmentation detection algorithm, detect all the straight line segments satisfying the constraint rules in the path image, and obtain the straight line segment detection image;
[0165] The clustering module 203 is used to perform feature extraction on the straight line segment detection image including all straight line segments, as a clustering sample, the nearest neighbor propagation clustering algorithm is used for clustering operation, and the straight line segments constituting the edge of the path are screened out;
[0166] The fitting module 204 is conf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More