

Multi-robot rapid task scheduling method based on multi-core computing
A multi-robot, task scheduling technology, applied in computing, energy-saving computing, instruments, etc., can solve the problems of low algorithm implementation efficiency, high time complexity, time-consuming and other problems, achieve fast computing speed, low time complexity, mutual The effect of small repulsion granularity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0082] The multi-robot fast task scheduling method based on multi-core computing in this embodiment includes the following contents:
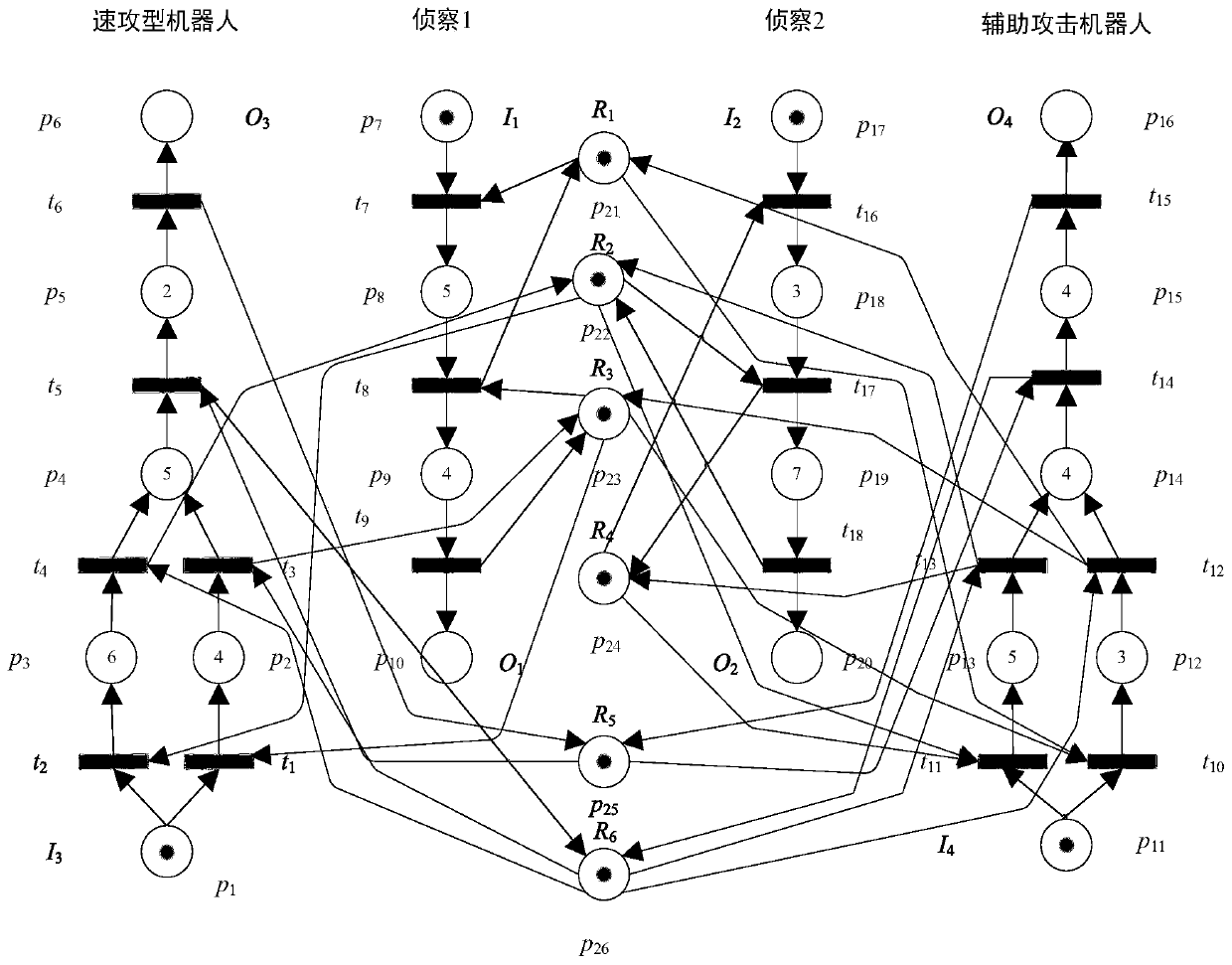
[0083] 1) The Petri net model constructed by the top-down method is as follows: figure 2 shown.
[0084] 2) Generate the program input file according to the model Petri net as follows:
[0085] Input file 1:
[0086] -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0
[0087] -1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0 0
[0088] 0 -1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 -1
[0089] 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 -1
[0090] 0 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 1
[0091] 0 0 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
[0092] 0 0 0 0 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0
[0093] 0 0 0 0 0 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 1 0 -1 0 0 0
[0094] 0 0 0 0 0 0 0 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
[0095] 0 0 0 0 0 0 0 0 0 0 -1 1 0 0 0 0 0 0 0 0 -1 0 -1 0 0 0
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More