

Robot control apparatus robot control method and program
A control device and robot technology, applied in the direction of program control manipulator, program control, general control system, etc., can solve the problem that PTP control cannot guarantee the moving path and cannot move at high speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
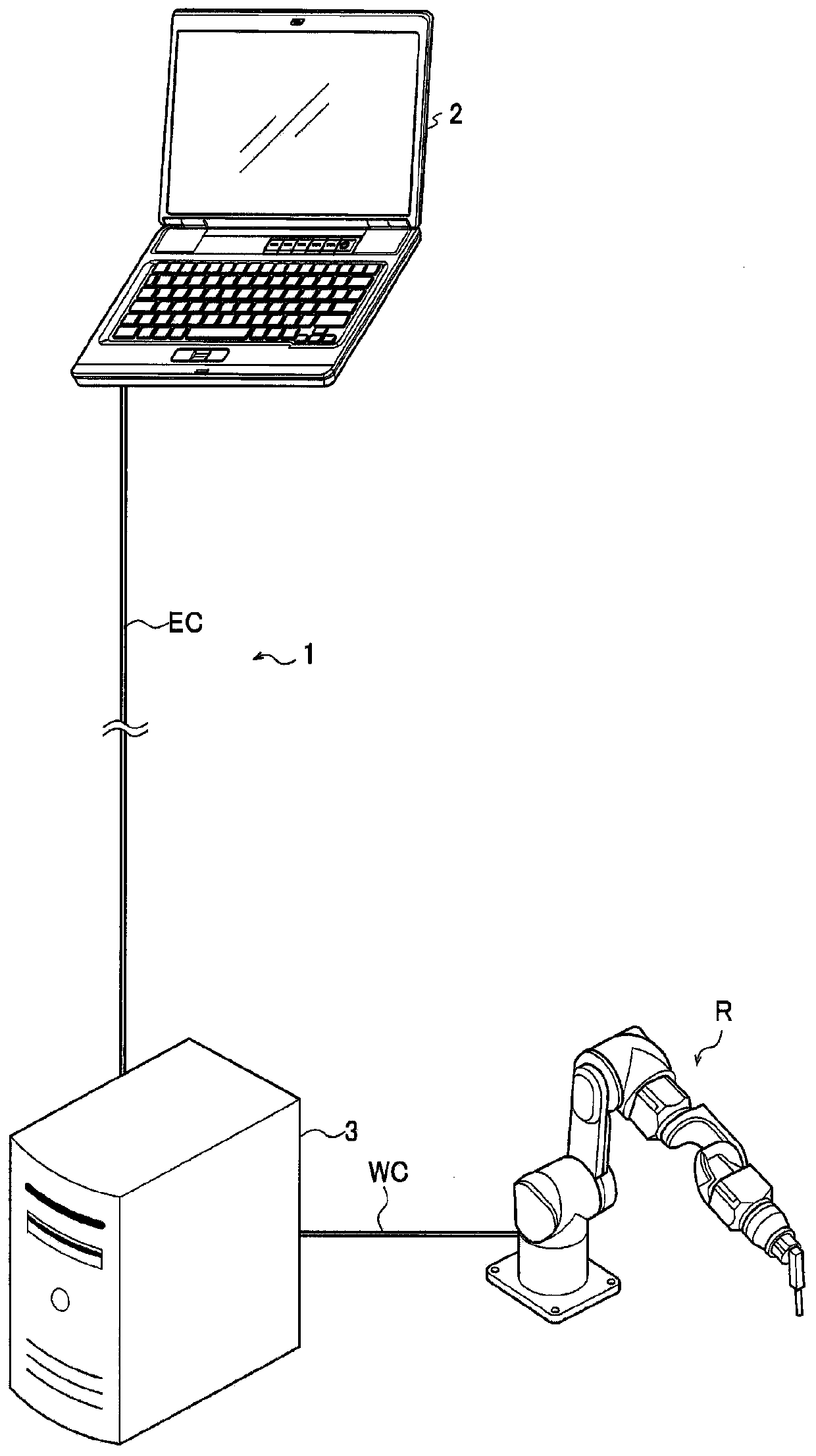
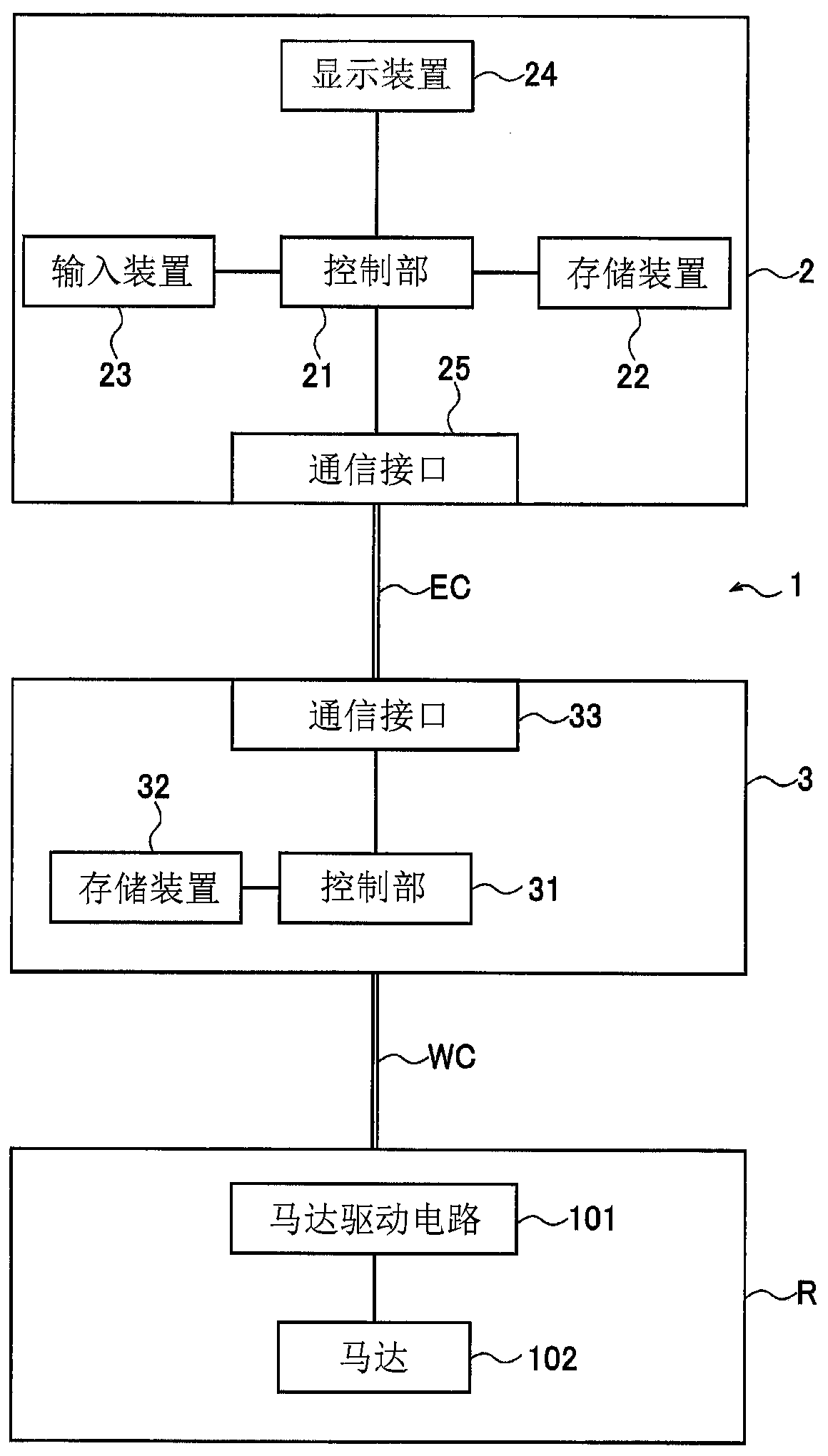
[0031] Hereinafter, a robot system including the robot controller according to the embodiment of the present invention will be described.
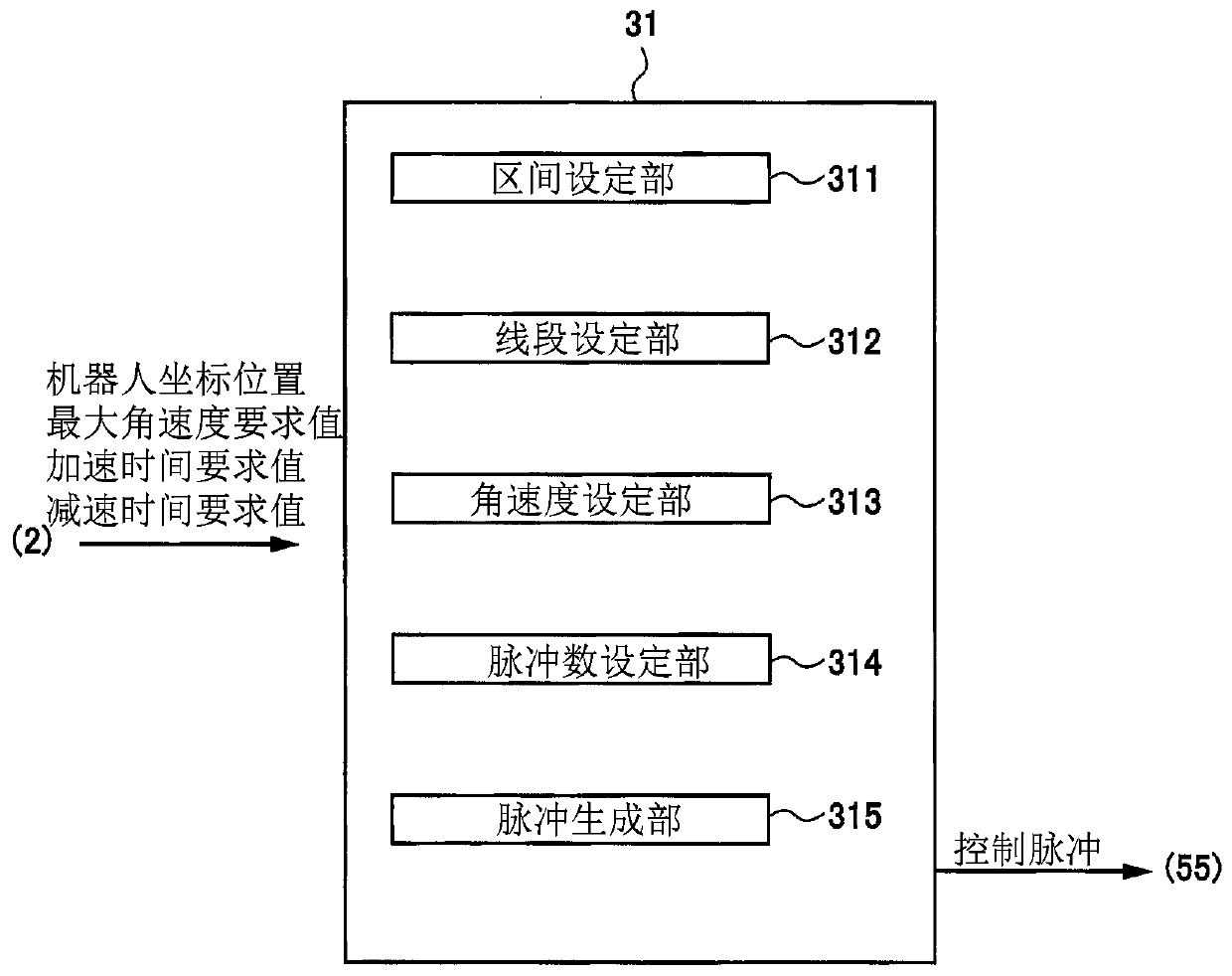
[0032] In the robot system according to each embodiment, when the robot's arm tip, which is the position of the attachment reference of the end effector as the reference point of the robot, is moved from the start point to the end point, the movement is controlled by linear interpolation control. In the linear interpolation control, the straight line connecting the start point and the end point is divided into a plurality of line segments, and the robot is moved by PTP control in each line segment. At this time, the PTP motion in each line segment is set to a fixed angular velocity, and the angular velocity on each line segment is optimally determined, thereby realizing high-speed approximate linear motion.
[0033] In the following description, the reference point of the robot refers to the position of the robot as a reference for teachin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More