

Path planning method, system and equipment for intelligent equipment as well as readable storage medium
A technology of intelligent equipment and path planning, which is applied in the direction of road network navigators, measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
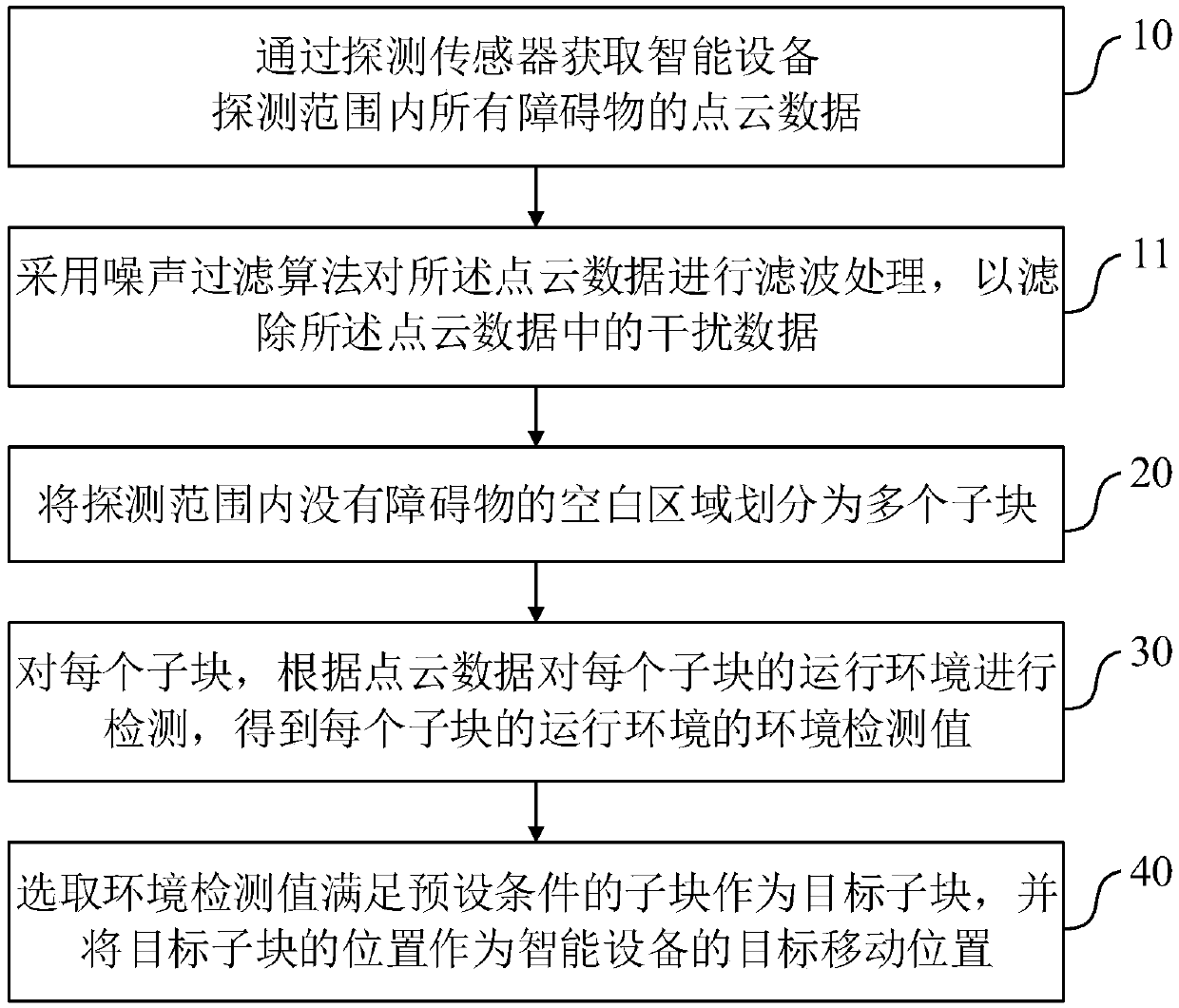
[0090] A path planning method for smart devices, such as figure 1 As shown, the path planning method includes:
[0091] Step 10. Obtain point cloud data of all obstacles within the detection range of the smart device through a detection sensor; the detection sensor is used to obtain point cloud data with depth information, and the detection sensor includes a binocular camera, an RGBD camera, an infrared camera, At least one of a multi-line laser and a single-line laser.
[0092] Step 20, divide the blank area without obstacles within the detection range into a plurality of sub-blocks; the area of the sub-blocks is not smaller than the floor area of the smart device;
[0093] Step 30, for each sub-block, detect the operating environment of each sub-block according to the point cloud data, and obtain the environmental detection value of the operating environment of each sub-block;
[0094] Step 40: Select a sub-block whose environment detection value satisfies a preset con...
Embodiment 2
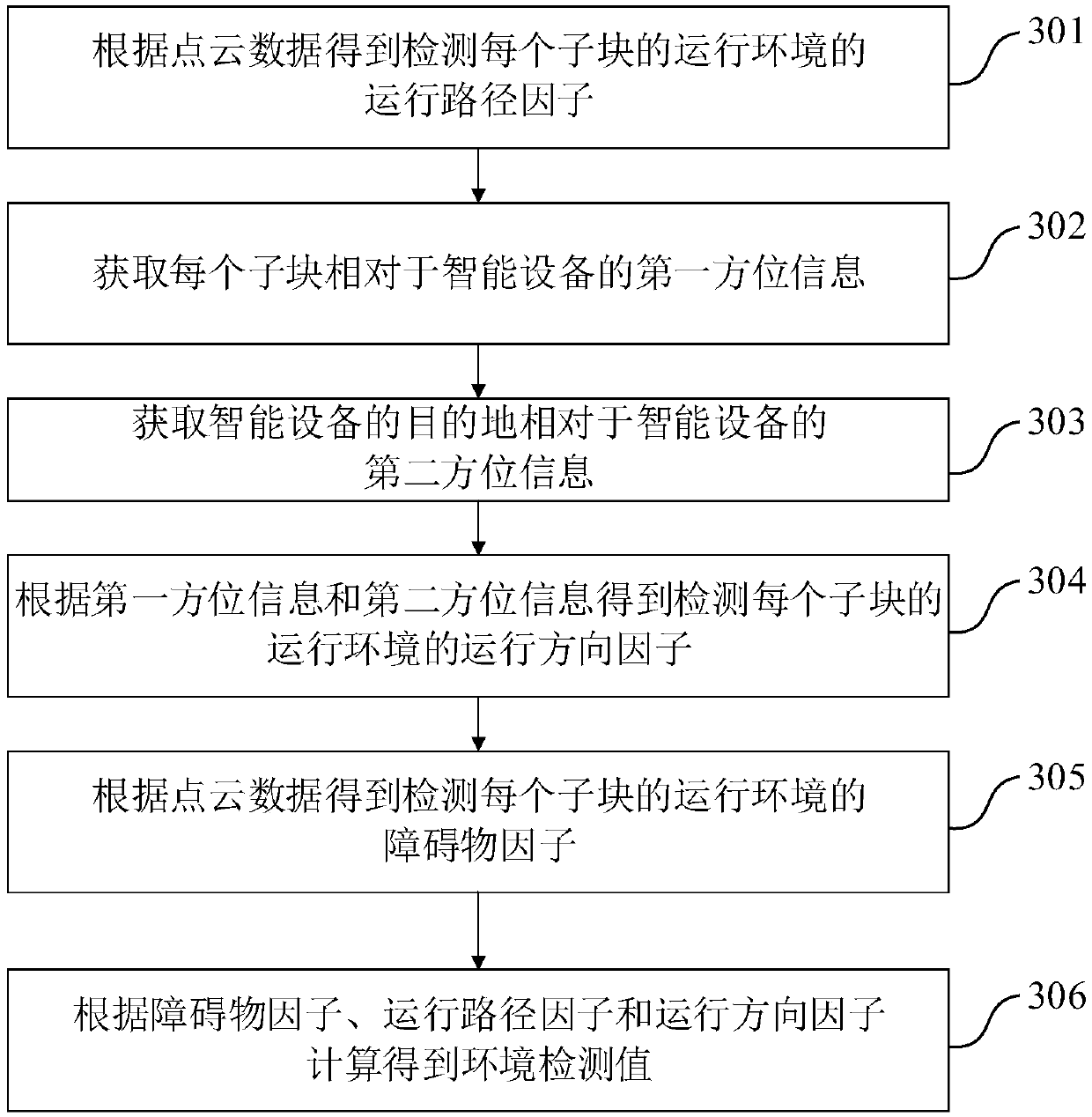
[0100] The path planning method of the smart device in this embodiment is further improved on the basis of Embodiment 1, such as figure 2 As shown, step 30 specifically includes:
[0101] Step 301. Obtain the operating path factor for detecting the operating environment of each sub-block according to the point cloud data; the operating path factor includes the distance information and / or the distance information between the moving path of the smart device to each sub-block and each obstacle. The width of the running path;
[0102] Step 302, obtaining the first orientation information of each sub-block relative to the smart device;
[0103] Step 303, acquiring the second orientation information of the destination of the smart device relative to the smart device;
[0104] Step 304, obtain the running direction factor for detecting the running environment of each sub-block according to the first orientation information and the second orientation information; the running direct...
Embodiment 3
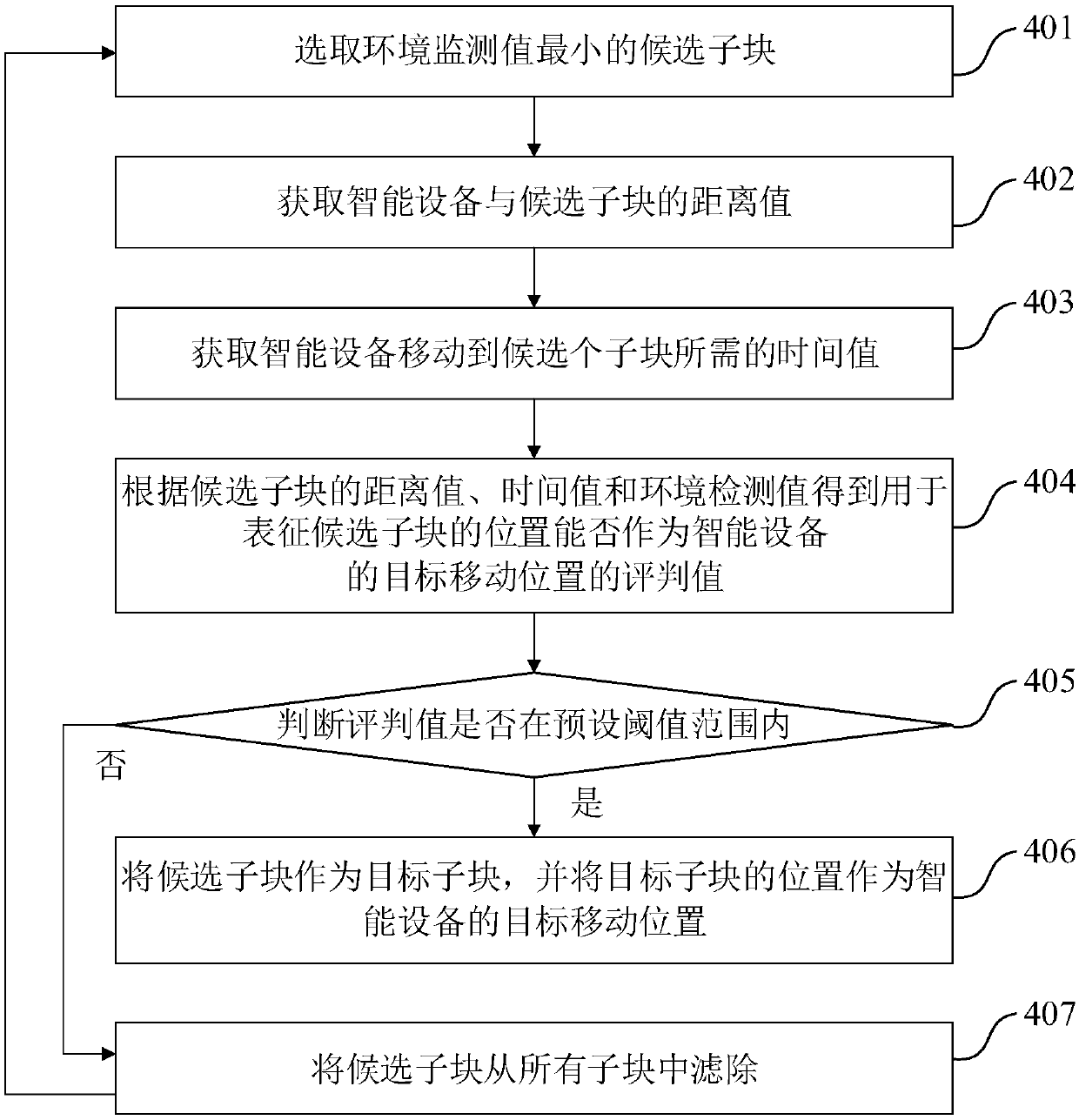
[0125] The path planning method of the smart device in this embodiment is further improved on the basis of Embodiment 1, such as image 3 As shown, step 40 specifically includes:
[0126] Step 401, selecting the candidate sub-block with the smallest environmental monitoring value;
[0127] Step 402, obtaining the distance value between the smart device and the candidate sub-block;
[0128] Step 403, obtaining the time value required for the smart device to move to the candidate sub-block;
[0129] Step 404, according to the distance value, time value and environment detection value of the candidate sub-block, obtain the evaluation value used to represent whether the position of the candidate sub-block can be used as the target mobile position of the smart device;
[0130] Step 405, judging whether the evaluation value is within the preset threshold range, if yes, execute step 406; if not, execute step 407;
[0131] Step 406, taking the candidate sub-block as the target sub-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More