A multi-robot cooperative trajectory information processing method using discretization method
An information processing method and multi-robot technology, applied in the field of multi-robot collaborative trajectory information processing, can solve the problems of high coupling and high complexity of system models, difficult to solve logical faults, large amount of calculation, etc., to overcome the lack of robustness and reliability. Scalability, overcoming the local optimum of the trajectory, overcoming the effect of a large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0054] Aiming at the problems existing in the prior art, the present invention provides a multi-robot collaborative trajectory information processing method using a discretization method. The present invention will be described in detail below in conjunction with the accompanying drawings.
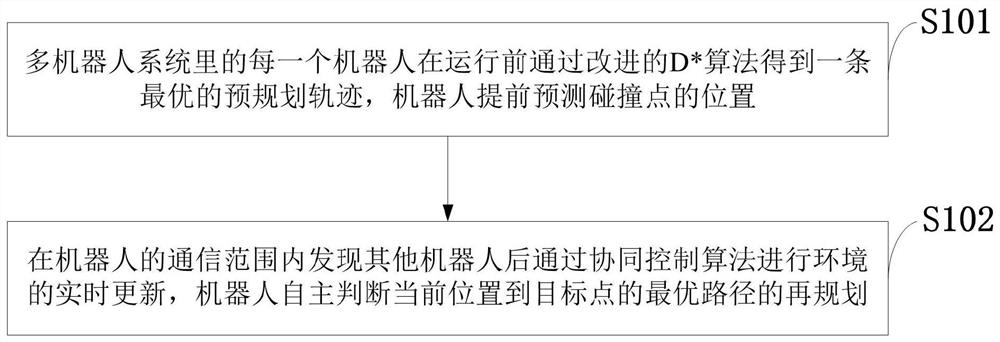
[0055] Such as figure 1 As shown, the multi-robot collaborative trajectory information processing method using the discretization method provided by the embodiment of the present invention includes the following steps:
[0056] S101: Each robot in the multi-robot system obtains an optimal pre-planned trajectory through the improved D* ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



