

Motion control method and device of robot and robot
A motion control device and motion control technology, applied in the direction of program control manipulator, program control, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
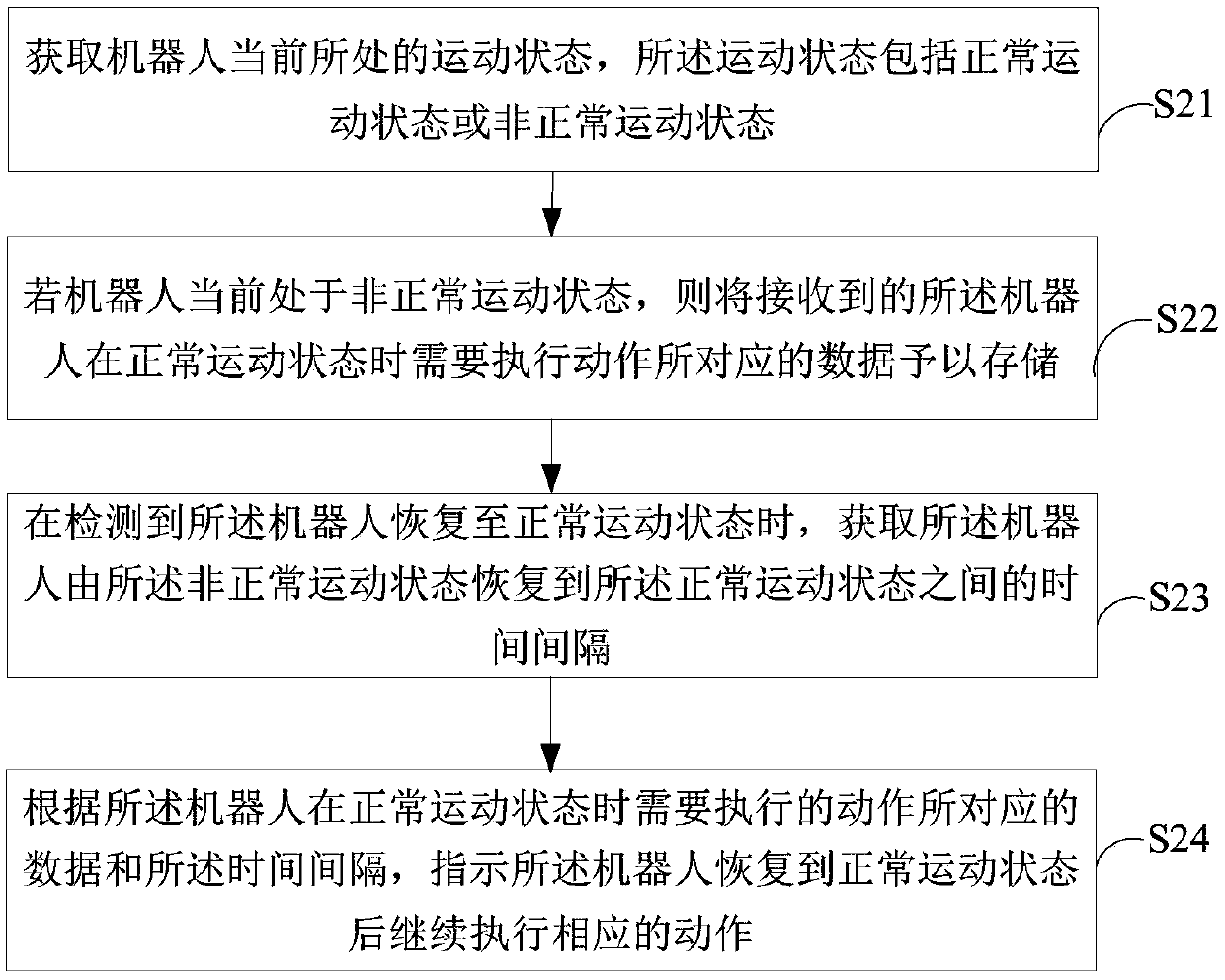
[0026] figure 2 It shows a schematic diagram of the implementation flow of a robot motion control method provided by the embodiment of the present application, and is described in detail as follows:
[0027] Step S21, acquiring the current motion state of the robot, the motion state includes a normal motion state or an abnormal motion state;
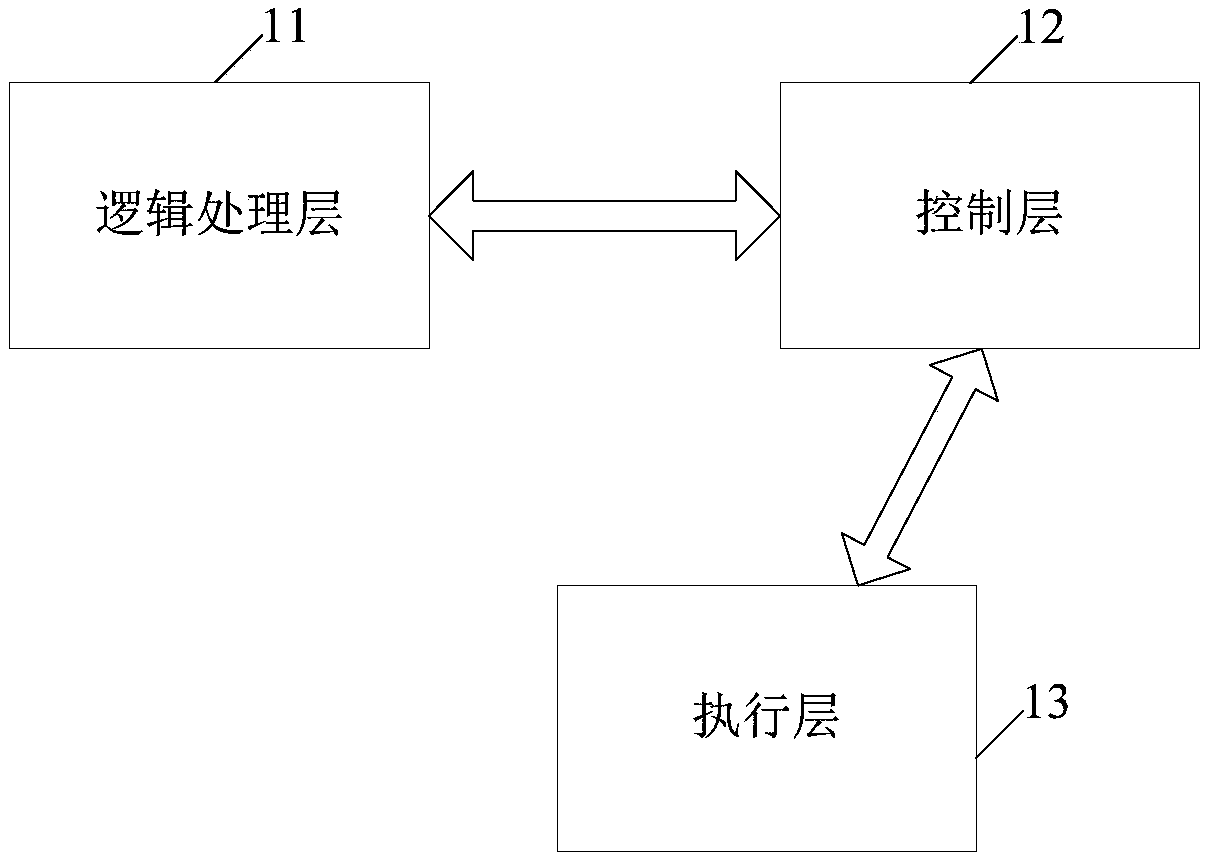
[0028] In the embodiment provided by the application, the logic processing layer and the control layer of the robot pass I 2 The C interface is connected to realize the communication between the two. Wherein, the logic processing layer includes the Raspbian system, and correspondingly, the control layer includes the STM32 system. The logic control layer acquires motion data of the robot from the control layer, so as to determine the current motion state of the robot according to the motion data. The motion state includes a normal motion state when the robot performs a preset action or an abnormal motion state when a fault occurs (suc...
Embodiment 2
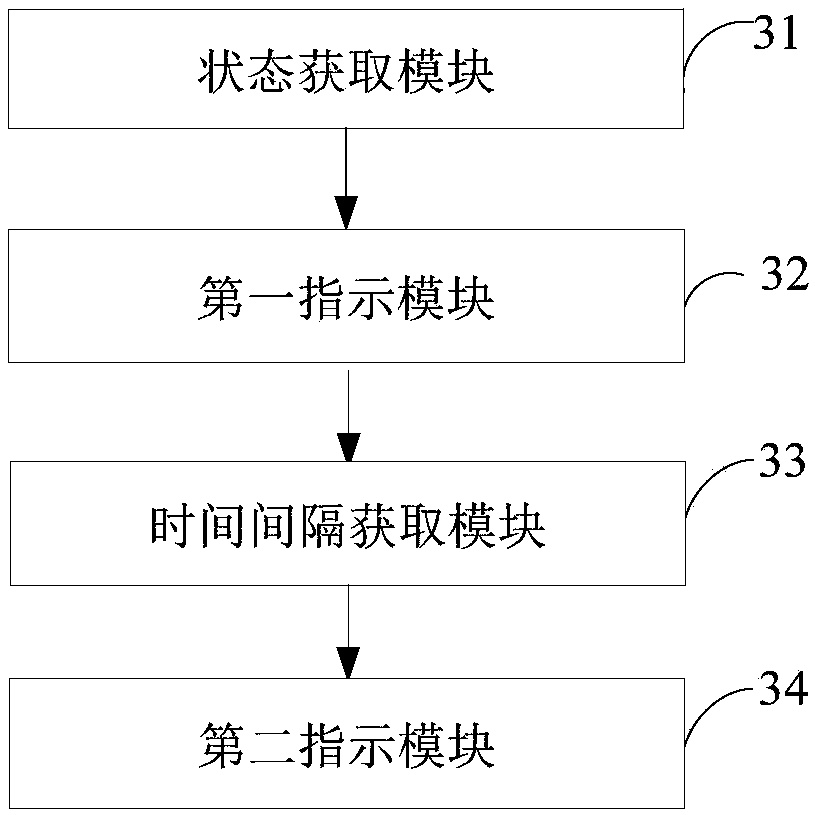
[0056] Corresponding to the motion control method of the robot described in the above embodiments, image 3 A structural block diagram of the motion control device of the robot provided by the embodiment of the present application is shown, and for the convenience of description, only the parts related to the embodiment of the present application are shown.
[0057] refer to image 3 , the motion control device of the robot includes: a state acquisition module 31, a first indication module 32, a time interval acquisition module 33 and a second indication module 34, wherein:
[0058] A state acquiring module 31, configured to acquire the current motion state of the robot, the motion state comprising a normal motion state or an abnormal motion state;
[0059] The first indication module 32 is used to store the received data corresponding to the actions that the robot needs to perform when it is in a normal motion state when the robot is currently in an abnormal motion state;
...
Embodiment 3
[0078] Figure 4 It is a schematic diagram of a robot provided by an embodiment of this application. like Figure 4 As shown, the robot 4 of this embodiment includes: a processor 40 , a memory 41 and a computer program 42 stored in the memory 41 and operable on the processor 40 . When the processor 40 executes the computer program 42, it realizes the steps in the embodiments of the above-mentioned motion control methods for each robot, for example figure 2 Steps S21 to S24 are shown. Alternatively, when the processor 40 executes the computer program 42, it realizes the functions of the modules / units in the above-mentioned device embodiments, for example image 3 The functions of modules 31 to 34 are shown.
[0079] Exemplarily, the computer program 42 can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 41 and executed by the processor 40 to complete this application. The one or more modules / units may be a series of c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More