Robot control system and robot
A control system and robot technology, applied in the field of robotics, can solve the problems of large error and high delay in image acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
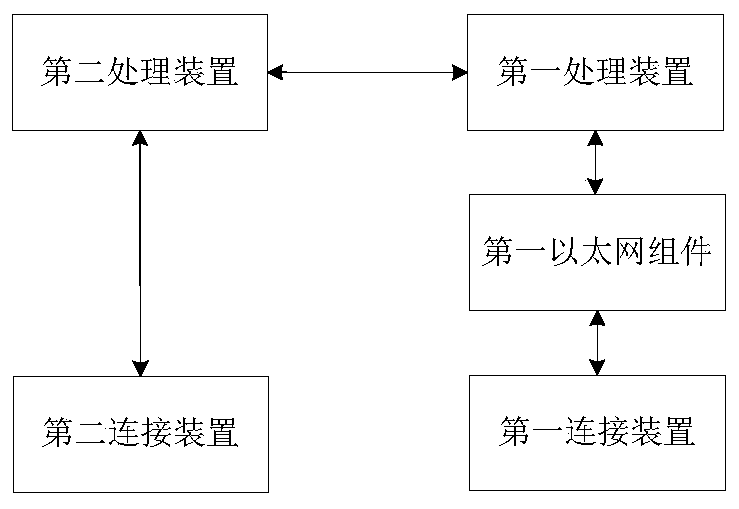
[0022] Before describing further details of the various embodiments of the present application, reference will be made to figure 1 To describe an alternative robot control system that can be used to implement the principles of the present application. In its most basic configuration, the figure 1 is a schematic diagram of the control system of the robot according to the embodiment of the present invention. The architecture depicted is only one example of a suitable environment for descriptive purposes and is not intended to suggest any limitation as to the scope of use or functionality of the application. Nor should the control system be interpreted as a figure 1 Any one or combination of components shown may have any dependencies or requirements.
[0023] Such as figure 1 As shown, the control system of the robot provided by the application includes:
[0024] The first connecting device is used for uploading first information, wherein the first information includes image...
Embodiment 2
[0067] According to an embodiment of the present invention, a robot is provided, and the robot includes the control system of any one of the robot in Embodiment 1 above.
[0068] It is easy to notice that the above-mentioned robot not only has the advantages of any one of the solutions in Embodiment 1 because it includes any one of the control systems in Embodiment 1, but also, the robot in this embodiment can perform data processing work that originally requires a fixed platform such as an industrial computer. The first processing device and the second processing device distributed to each robot chassis greatly reduce the workload of the industrial computer, realize high-performance edge computing, and achieve the purpose of reducing the size of the robot and improving the computing power of the robot; Low-voltage power supply is adopted, and the purpose of low power consumption is realized at the same time.
[0069] The serial numbers of the above embodiments of the present ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More