

Path planning optimum control method for deck of ship-based aircraft based on NSP algorithm
A technology of path planning and optimal control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of optimal control without considering path planning, without considering non-holonomic motion constraints, control constraints, precision Not advanced problems, to achieve the effect of solving precise path planning and optimal control problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
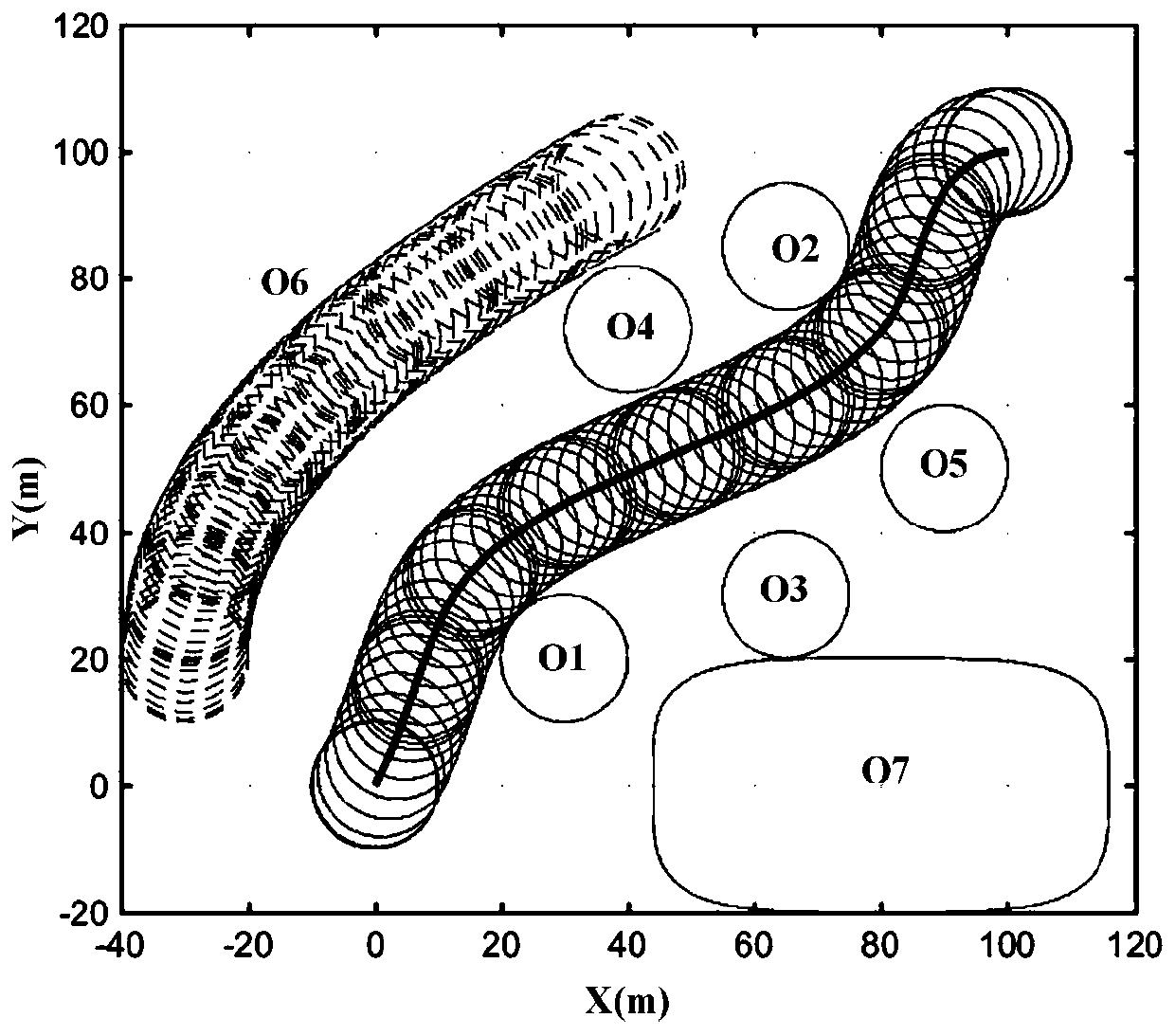
[0096] First, the obstacle environment is modeled. Assume that there are 7 obstacles in total, obstacle 7 is polygonal, a=34m, b=18m, and other obstacles are circular. The specific parameters are shown in the table below.
[0097] Table 1 Obstacle parameter table
[0098] obstacle Radius (m) Abscissa position Ordinate position 1 8 30 20 2 8 65 85 3 8 65 30 4 8 40 72 5 8 90 50 6 8 -30+0.003t 2
20+0.5t 7 ----- 80 0
[0099] Secondly, according to the shape characteristics of the carrier-based aircraft, the relevant parameters are clarified. For example, the radius is r=10m, the safety distance is dist=2m, and the initial state is X 0 =(0 0 60° 0) T , the state at the end point is X f =(100 100 0° 0) T , L=7m. The state and control variables are constrained in the range: V min = 0m / s, V max = 1m / s, u 1min =-1, u 1max = 1, u 2min =-1m / s 2 , u 2max =1m / s 2 , wk=0.2.
[0100] Then, set the relevan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More