

Multi-target video tracking system based on fractal feature estimation
A technology of video tracking and fractal features, applied in the field of video tracking, can solve problems such as inability to track the initial image sequence, and achieve the effects of low missed detection rate, good robustness, and high tracking stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] A multi-target video tracking system based on fractal feature estimation, including image local fractal feature estimation, observation model establishment, likelihood function calculation and multi-Bernoulli filter tracking.
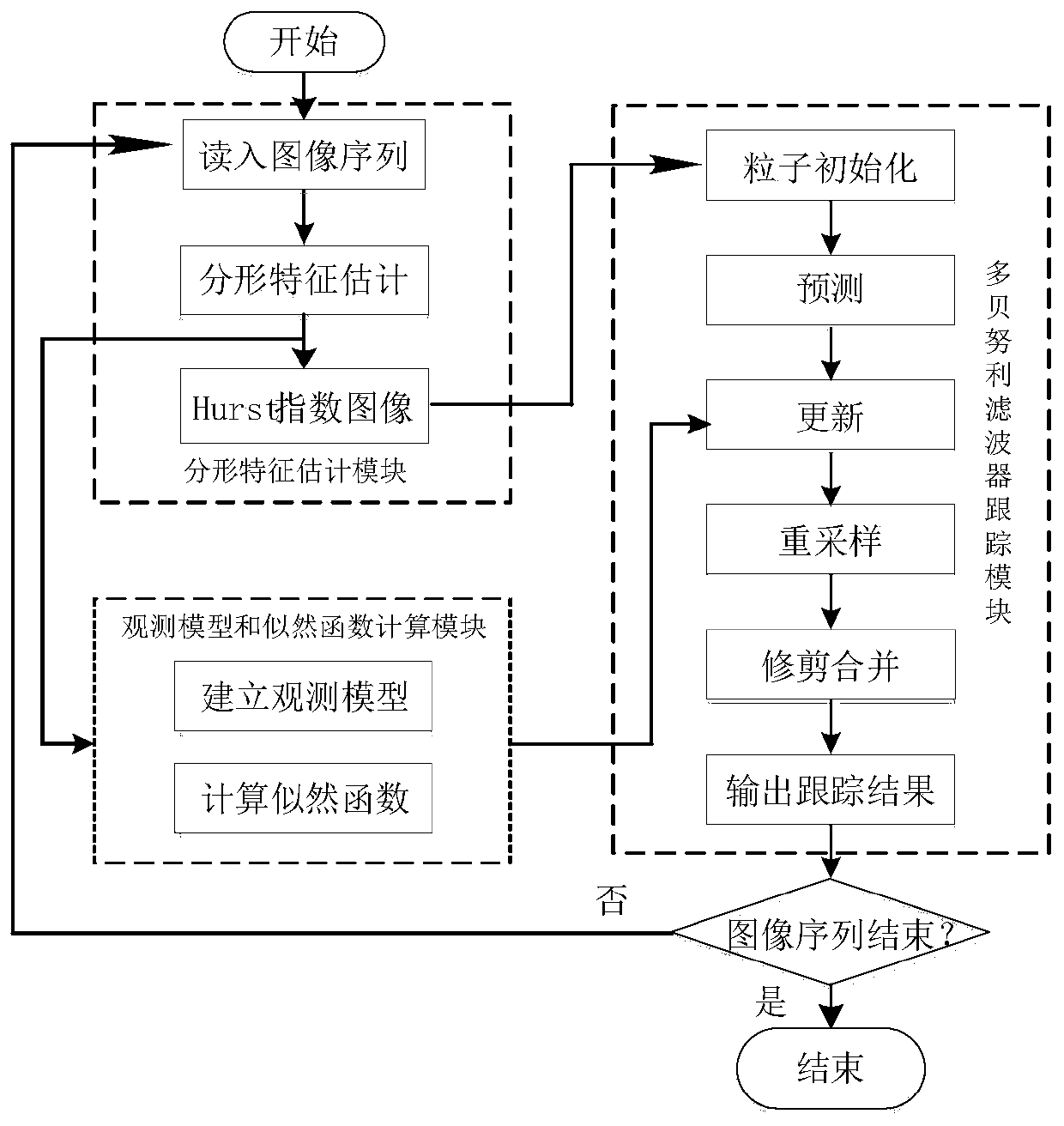
[0056] Such as figure 1 As shown, the system consists of three main modules: image conversion module based on fractal feature estimation, observation model and likelihood function calculation module, and sequential Monte Carlo multi-Bernoulli filter module.
[0057] For each frame of original image in video original image sequence, such as figure 2 The cell sequence shown, as image 3 The indoor scene shown, such as Figure 4 In the outdoor scene shown, firstly, the fractal feature of each frame of image is calculated by using the rescaled range method, that is, the Hurst index, and it is converted into a new Hurst index image, and the image is used as a sequential Monte Carlo multi-Bernoulli input to the filter, which then performs tracking ...
Embodiment 2
[0080] A multi-target video tracking system based on fractal feature estimation, including image local fractal feature estimation, observation model establishment, likelihood function calculation and multi-Bernoulli filter tracking.
[0081] The fractal feature estimation uses the rescaled range method to estimate the Hurst exponent of all pixels in each frame image, the steps are:
[0082] The given time series {x 1 ,x 2 ,...,x m ,...,x N} into t non-overlapping subintervals, and then calculate the tth subinterval (x 1 ,x 2 ,...,x t ) mean
[0083]
[0084] Using this mean value, the cumulative dispersion φ is calculated sequentially t (i), range R t and standard deviation S t .
[0085]
[0086]
[0087]
[0088] Calculate R for all subintervals in turn t / S t , R for any subinterval t / S t satisfy
[0089] (R / S) t ∝t H (5)
[0090] Among them, H is the Hurst exponent, and in the double logarithmic coordinate system, H is the point (logt,log(R ...
Embodiment 3
[0112] A multi-target video tracking system based on fractal feature estimation, including image local fractal feature estimation, observation model establishment, likelihood function calculation and multi-Bernoulli filter tracking.
[0113] Among them, the observation model establishment and likelihood function calculation, steps:
[0114] Assuming that the Hurst index image of size M×N in the kth frame is expressed as in is the Hurst exponent of the i-th pixel. The multi-target state is expressed as X={x 1 ,x 2 ,...,x n}, where n is the number of targets, and the i-th target x i Expressed as a rectangular block T(x i ). Modify the measurement observation model (14) to (15).
[0115]
[0116]
[0117] where g(y) represents the likelihood function that the pixel belongs to the background, g(y; x i ) is the likelihood function of the i-th target in the image y, g(H k |X) represents the kth frame Hurst index image H k The likelihood function of the target stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More