

A Flexible Manipulator Device with Active and Passive Stiffness Adjustment
A flexible manipulator and manipulator technology, applied in the field of robotics, can solve problems such as poor structural flexibility, large volume, and complex structure, and achieve the effects of reducing overall mass, large adjustment range, and simplified structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The specific embodiments of the present invention are described below so that those skilled in the art can understand the present invention, but it should be clear that the present invention is not limited to the scope of the specific embodiments. For those of ordinary skill in the art, as long as various changes Within the spirit and scope of the present invention defined and determined by the appended claims, these changes are obvious, and all inventions and creations using the concept of the present invention are included in the protection list.
[0033] An embodiment of the present invention will be described in detail below in conjunction with the accompanying drawings.
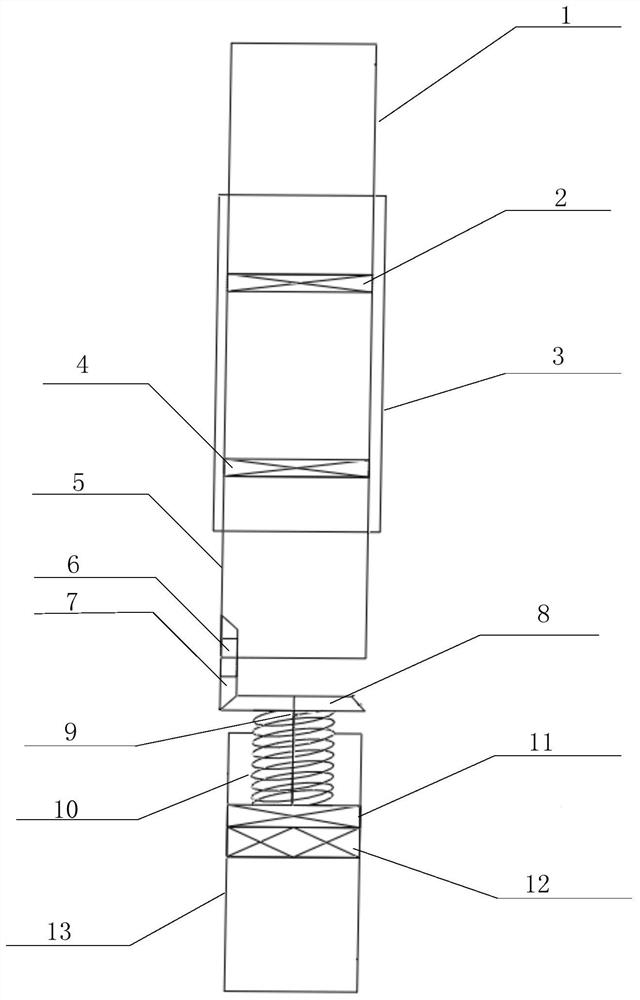
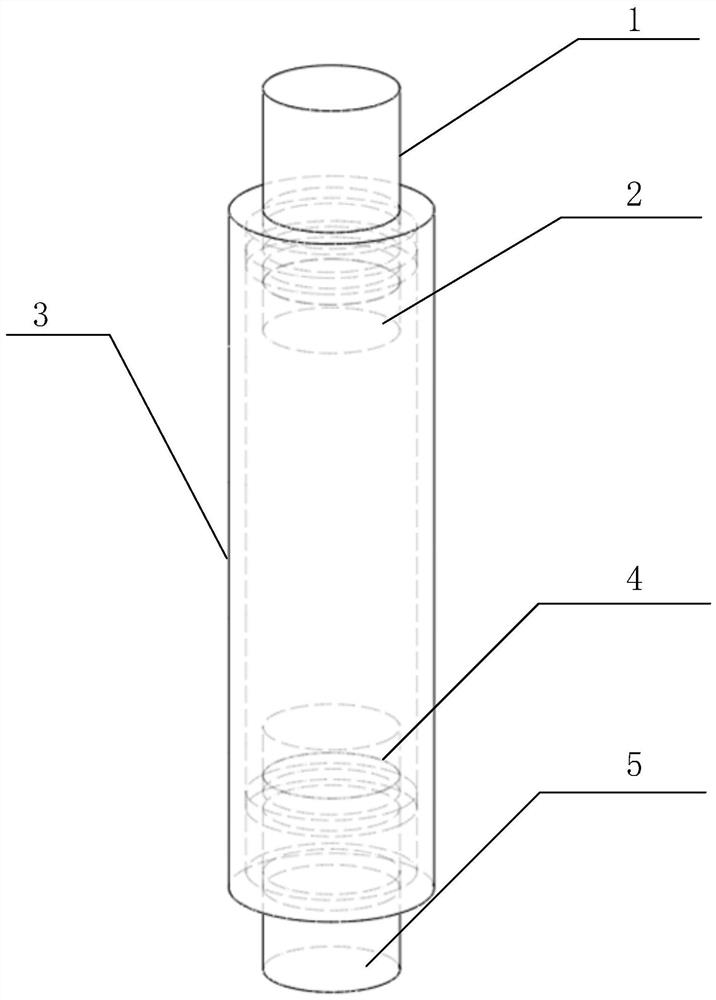
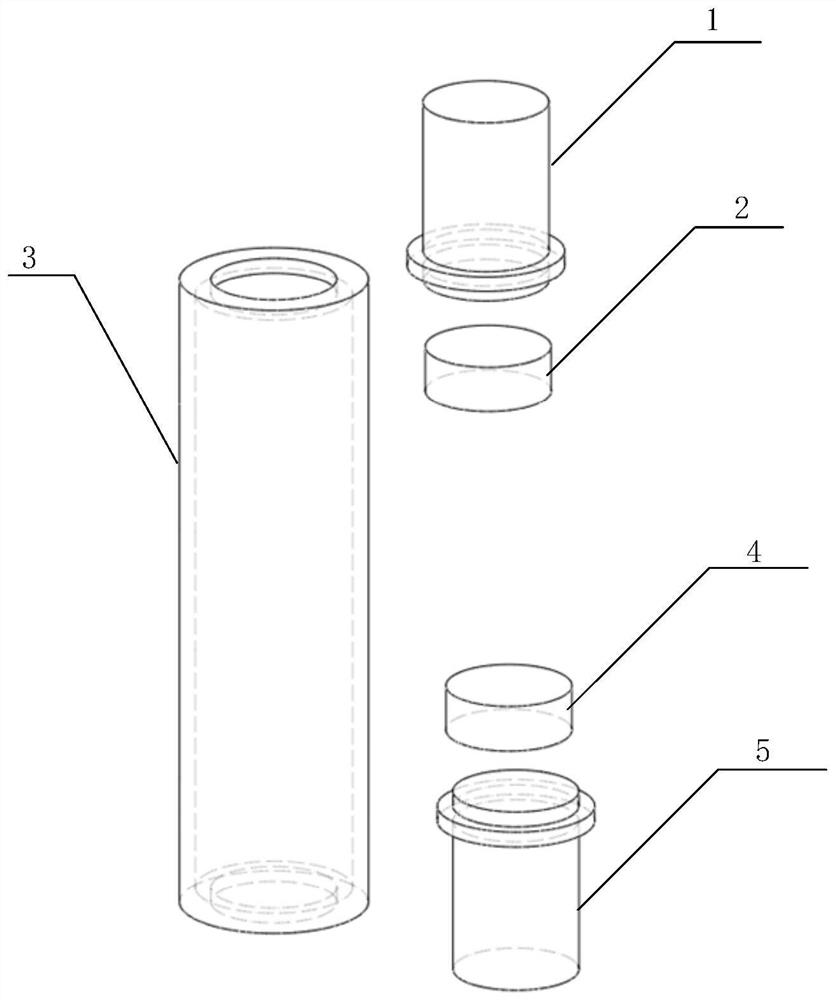
[0034] Such as Figure 1-Figure 3 As shown, a flexible mechanical arm device that can actively and passively adjust the stiffness includes a first mechanical arm 1, a first electromagnet 2, a cylinder cavity 3, a second electromagnet 4, a second mechanical arm 5, and a spline Shape elastic elemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More