

Autonomous parking trajectory planning method suitable for multiple scenarios
A technology for autonomous parking and trajectory planning, applied in navigation calculation tools, control devices, etc., can solve problems such as inability to guarantee optimality, easy deviation of the controller, constraint violation, etc., and achieve high practical application value and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be noted that the following embodiments are intended to facilitate the understanding of the present invention, but do not limit it in any way.
[0100] In this embodiment, a vehicle reversing into a garage is taken as an example to describe in detail an autonomous parking trajectory planning method applicable to multiple scenarios.
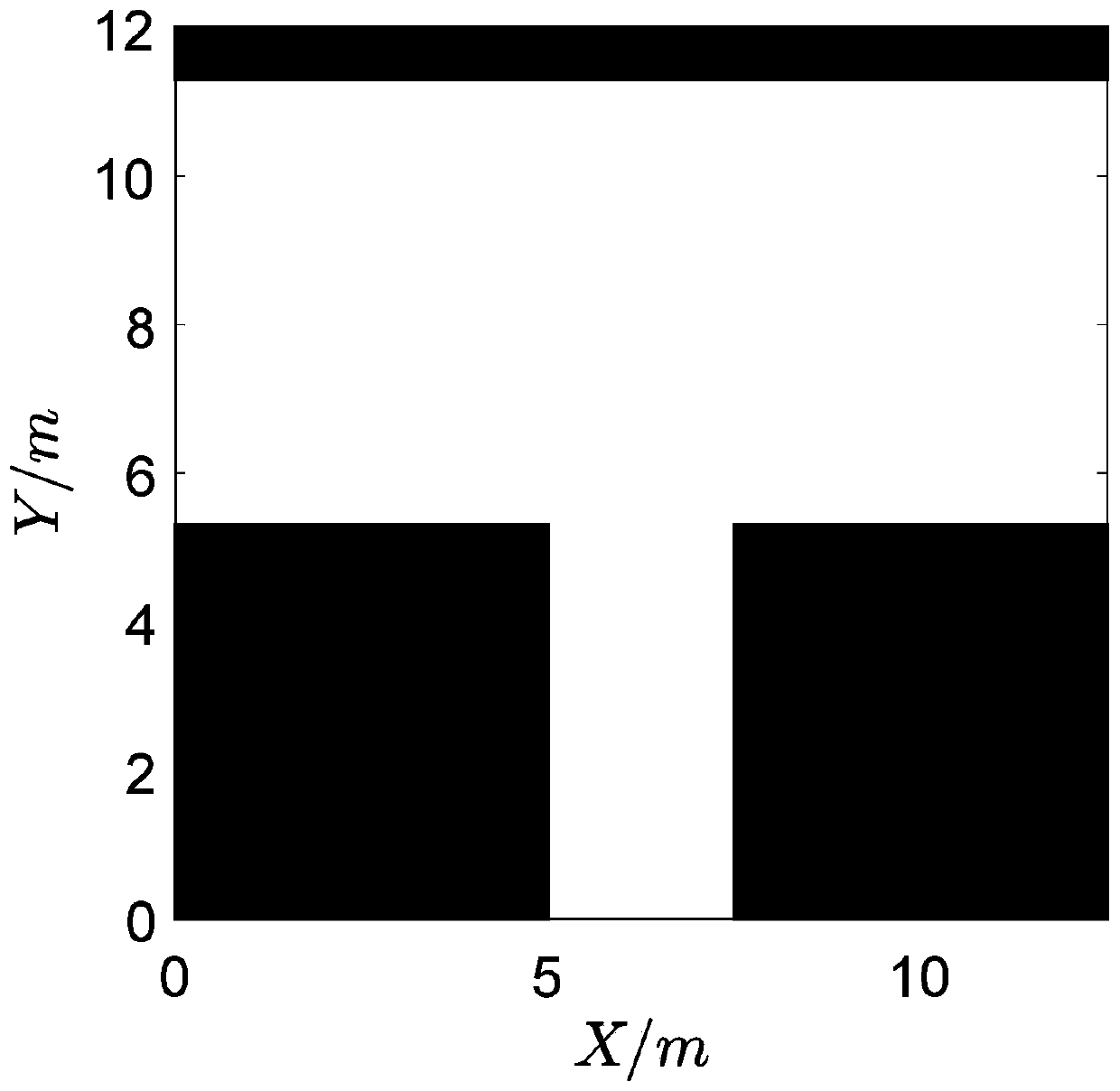
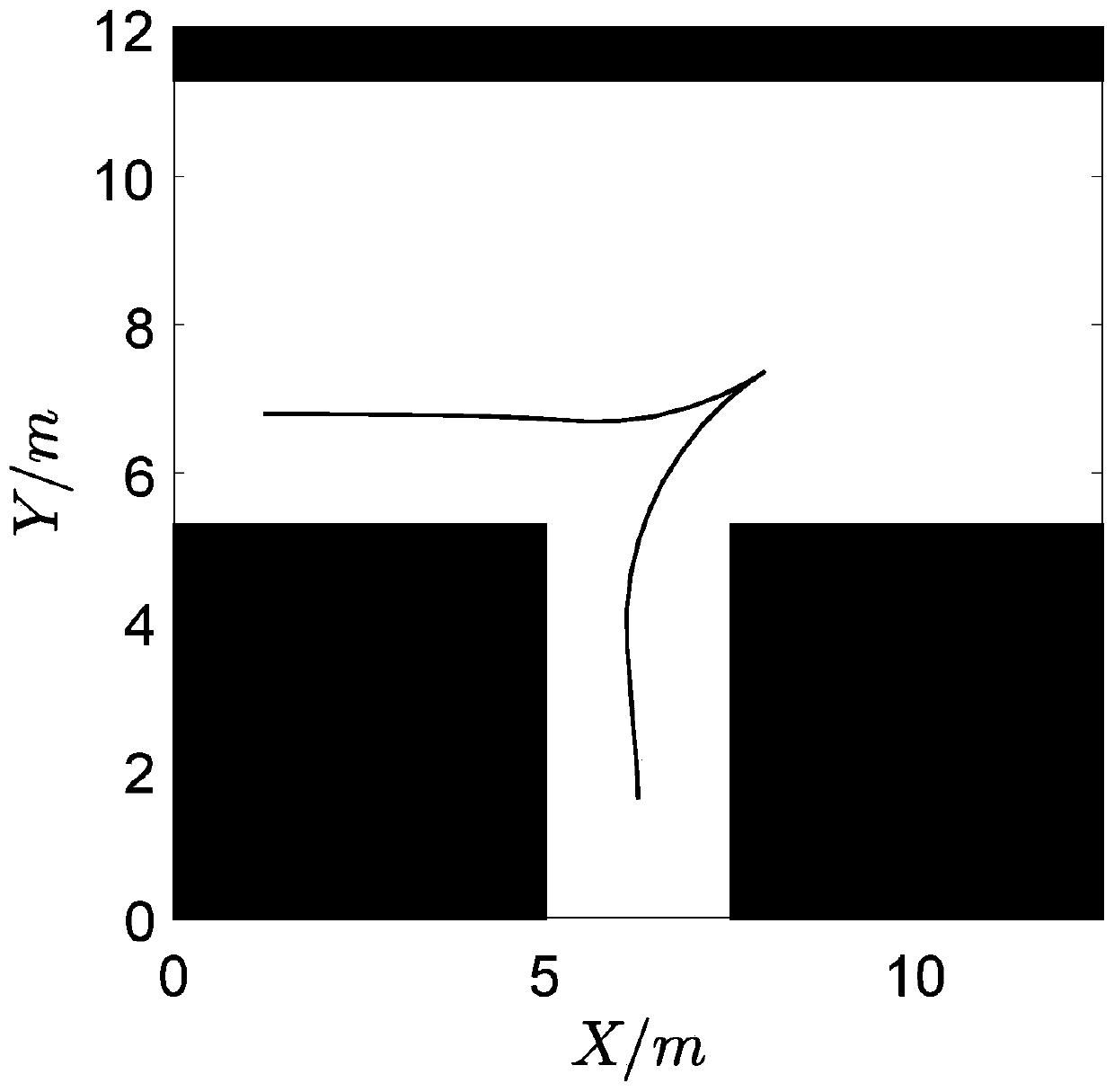
[0101] The vehicle needs to be in figure 1 In the parking scene shown, the reverse parking is completed, where the parking space is 5 meters long, 2.5 meters wide, and the operating road width is 6 meters.
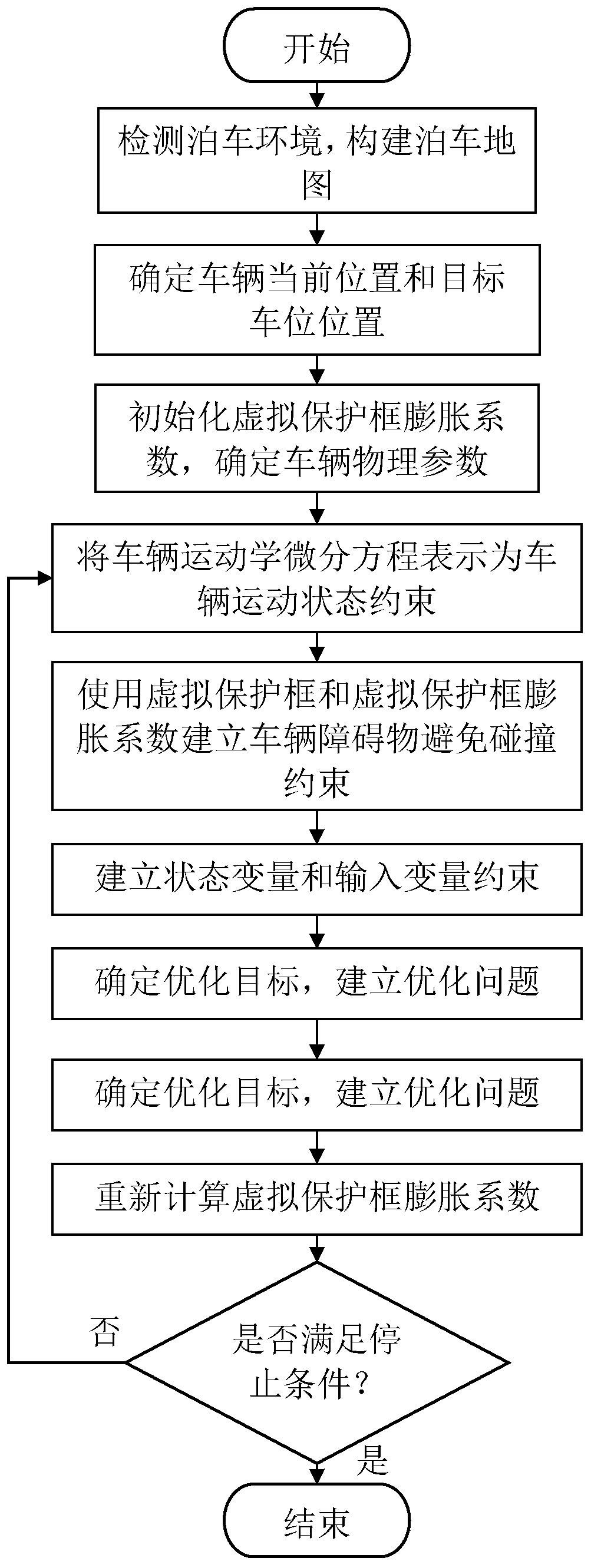
[0102] like figure 2 As shown, an autonomous parking trajectory planning method suitable for multiple scenarios, including:
[0103] Step 1. Detect the parking environment and build a parking map, where obstacles are represented by closed or semi-closed polygons;
[0104] Step 2, determine the curren...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More