

On-line calibration method for cluster aircraft carrying MEMS gyroscope load
A calibration method and gyroscope technology, applied in the direction of instruments, measuring devices, etc., can solve the problems of difficult realization of the calibration path, and achieve the effect of short calibration path time, short calibration time and fast calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
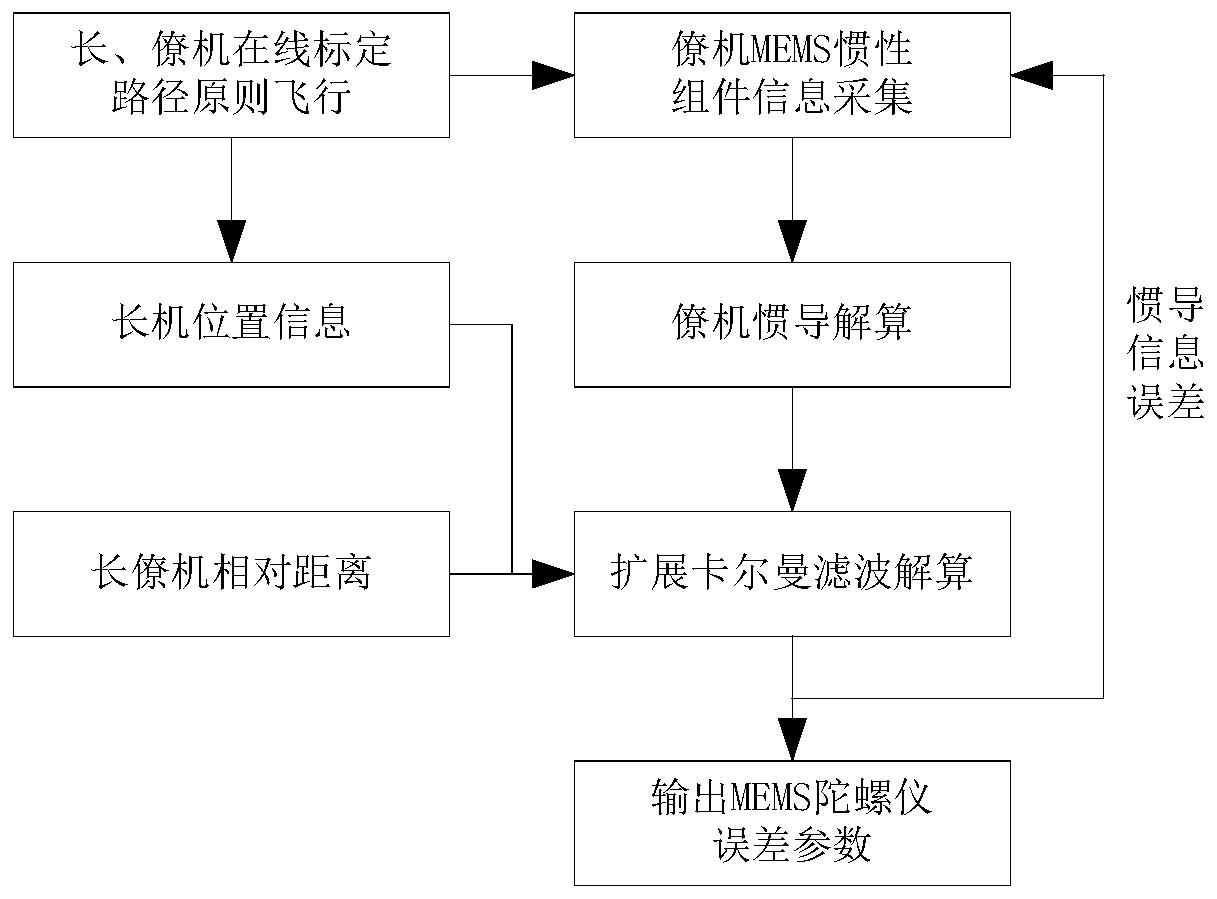
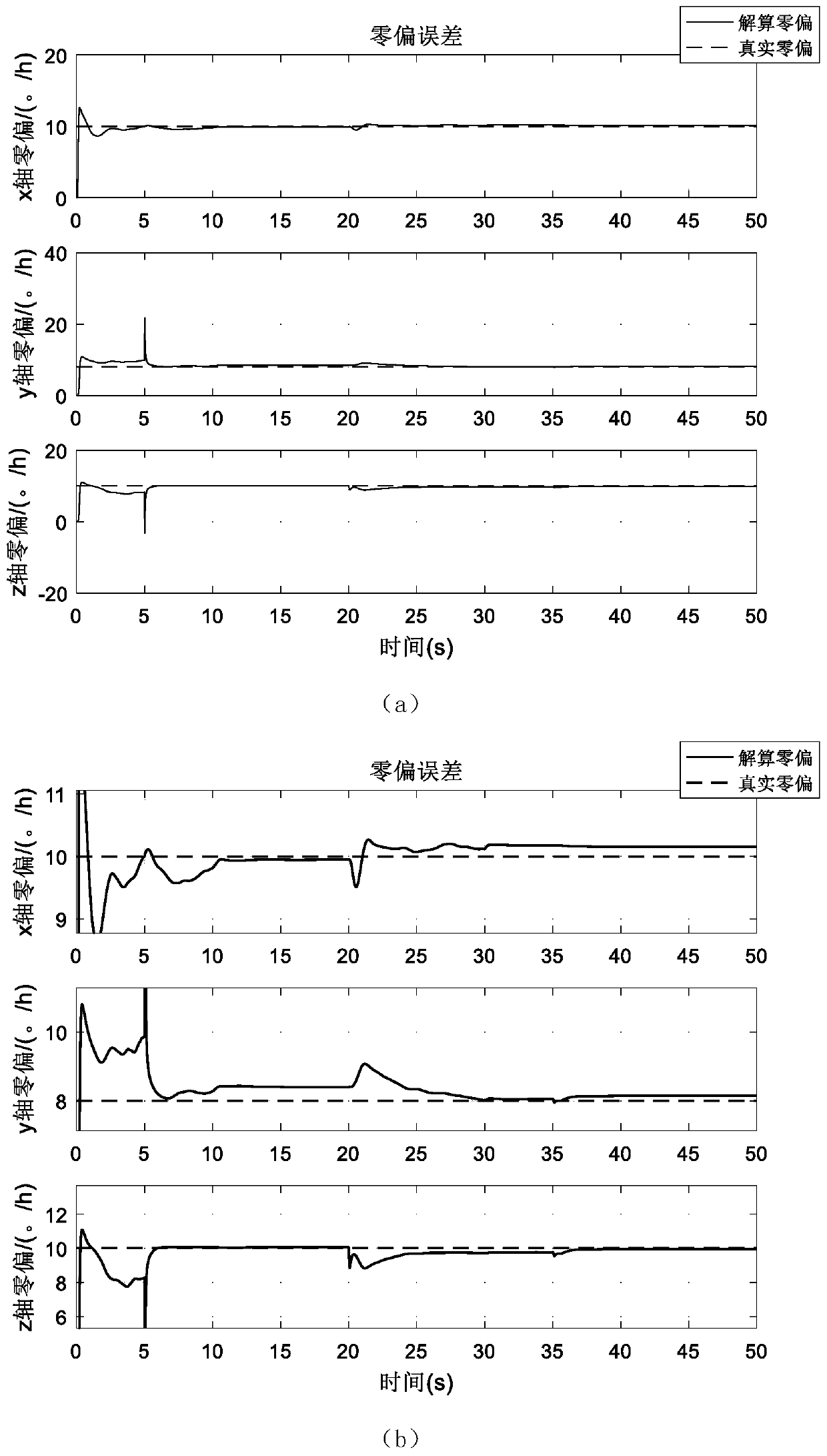
[0137] The beneficial effects of the present invention are verified in the following manner:
[0138] The MATLAB simulation is carried out for the fast online calibration method for the MEMS gyroscope load carried by the swarm aircraft proposed by the present invention, and the simulation time is 50s.
[0139] Design the calibration path according to the calibration path design principle in step 1.
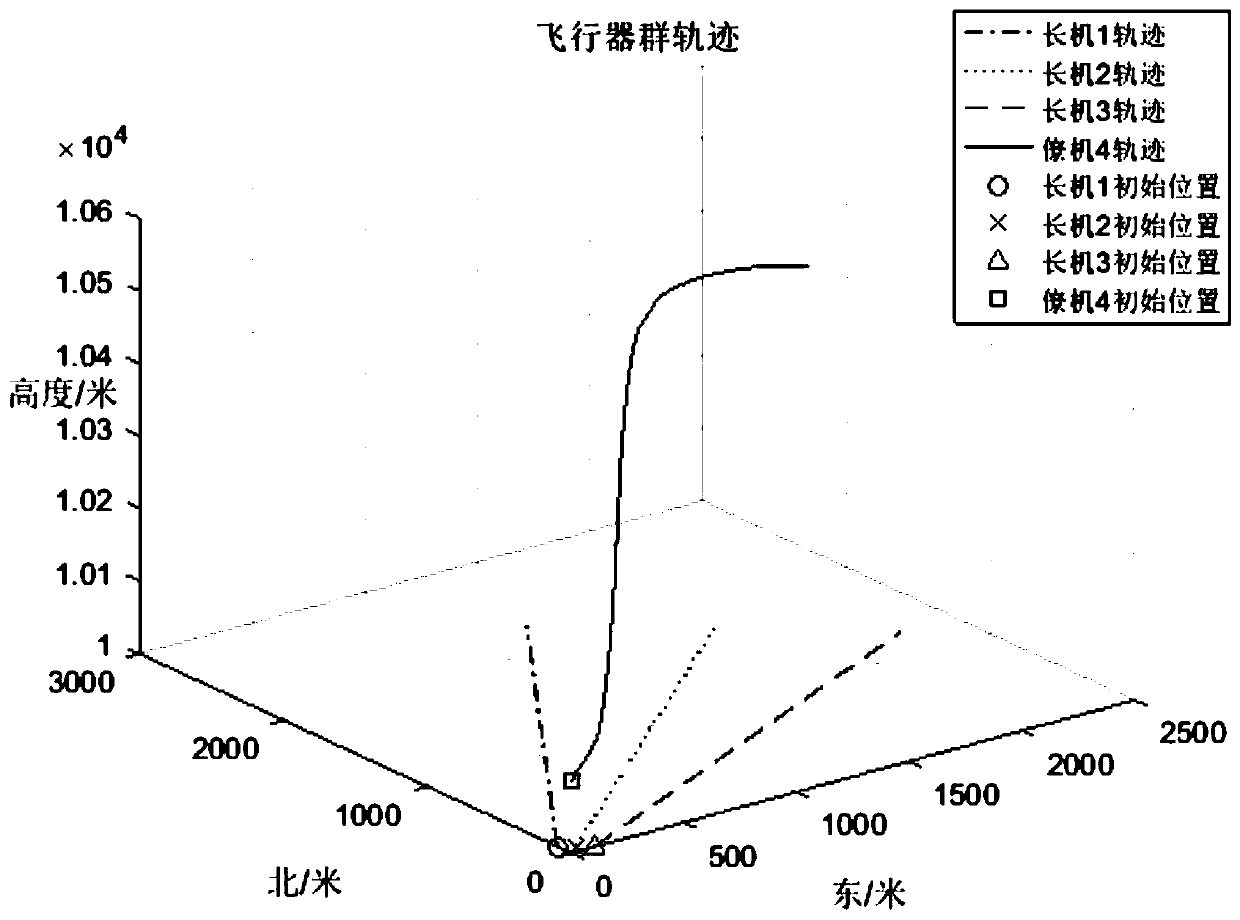
[0140] The wingman path is as follows:
[0141] Sequence 1, the wingman accelerates northward, the acceleration is 10m / s, and the acceleration time is 5s;
[0142] Sequence 2, the wingman moves at a constant speed, and the time for moving at a constant speed is 5s;
[0143] Sequence 3, wingman pitch motion, pitch angle change rate 6° / s, pitch motion time 10s;
[0144] Sequence 4, wingman pitch movement, pitch angle change rate -6° / s, pitch movement time 10s;
[0145] Sequence 5, the wingman rolls, the roll angle change rate is 6° / s, and the pitching time is 5s;
[0146] Seque...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More