

An image recognition-based tree barrier automatic removal robot and its application method
A technology of image recognition and automatic removal, applied in the direction of botanical equipment and methods, applications, electric pruning saws, etc., can solve problems such as incomplete removal of obstacles, safety, etc., and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
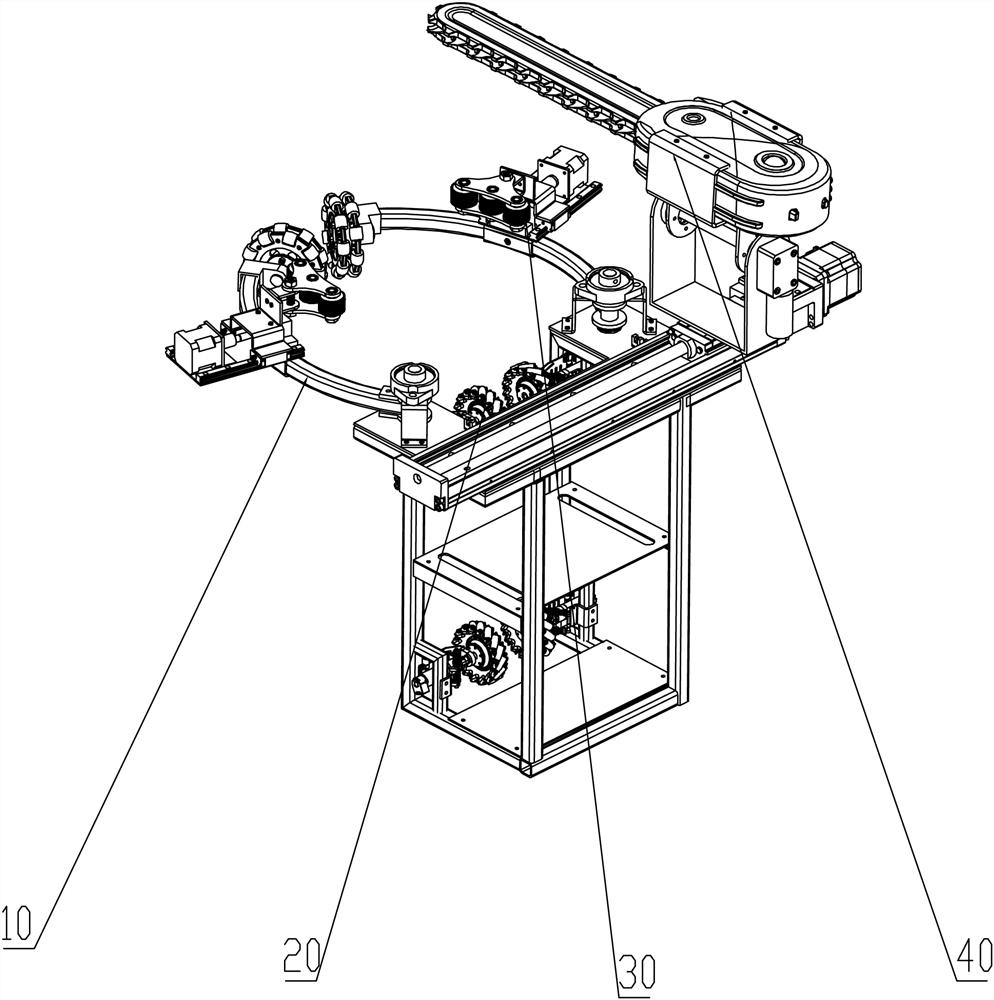
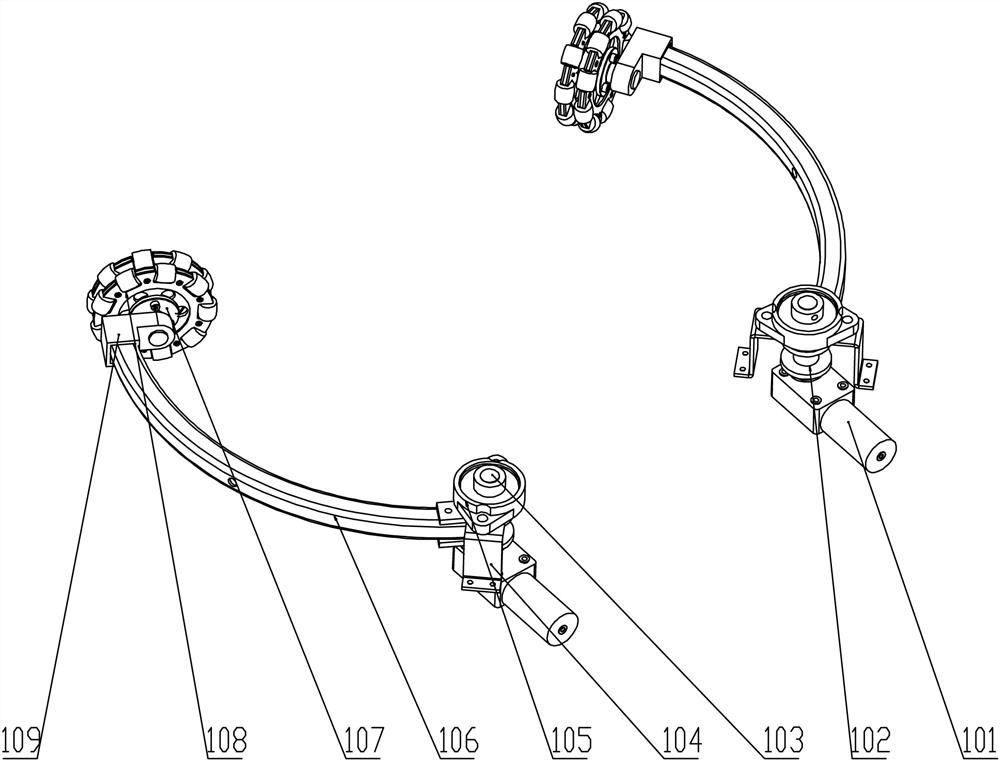
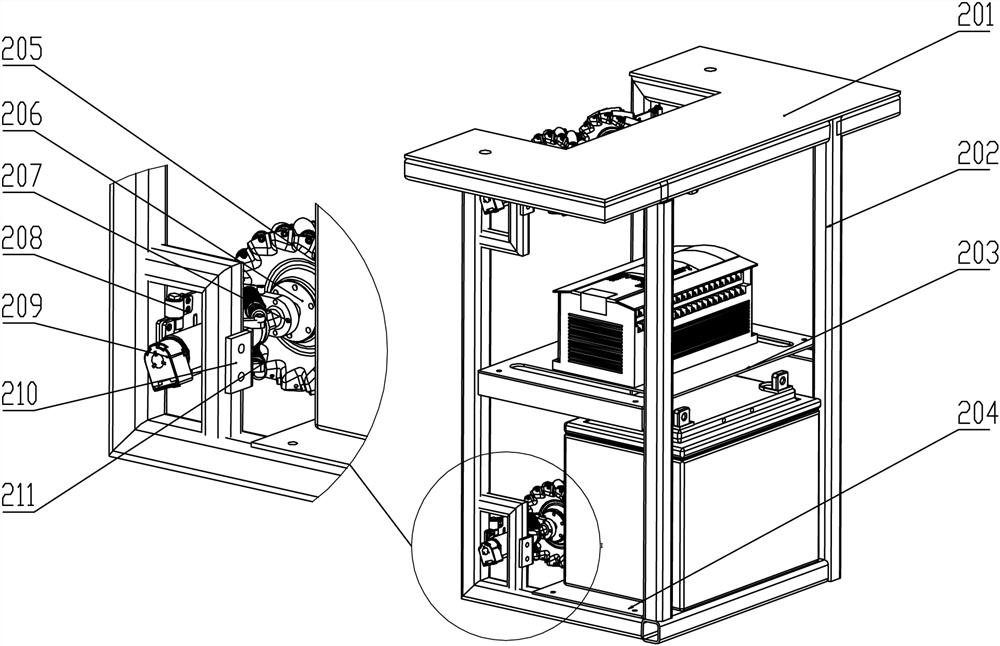
[0043] See Figure 1-5 An image-identified tree barrier automatically clears the robot, which includes a mechanical structure and a control system comprising a grasage mechanism 10 for ring and grasping the trunk, the gripping mechanism 10 is mounted in a coinciding trunk and The climbing and positioning mechanism 20 for supporting the entire mechanical structure is mounted on the gripping mechanism 10, which is used to prevent the robot from falling, and the climbing and position adjusting mechanism 20 is fixedly installed. Treebs to trimmed the trimming mechanism 40; the control system includes a sensing and detection subsystem, a communication transfer subsystem, a motion control subsystem, a power supply subsystem, and a remote operating subsystem. By using the tree barrier of the above structure, the robot can be used to automatically trim the automatic trim of the tree barrier below the transmission line, the manual climbing trimming process of the transmission line, thereby ...
Embodiment 2
[0055] A method of using an image identification tree barrier automatically clears a method of using a method, characterized in that it includes the following steps:
[0056] Step 1: The operator carries the robot to reach the trees that need to be cleaned;
[0057] Step 2: Turn on the robot power, use the control mobile tablet terminal to connect the wireless hotspot established by the robot, open the control interface, control the seizure mechanism 10 open, close the robot to the tree, and control the grabs between the mechanism 10, control the seizure mechanism 10 closed;
[0058] Step 3: Control the robot moves upwardly from the trunk to the branches that need to be trig, adjust the robot positions and the angle of the electric chain saw 410, so that the electric chain saw 410 plane is in the vertical direction, rotate to a certain position, the robot climbs, electric chains Saw 410 is in contact with branches, cutting branches;
[0059] Step 4: Observe the robot's health and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More