

Two-shaft parallel turnover grabbing robot
A robot and parallel technology, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as the influence of the maximum load of the moving platform, and achieve the effects of easy manufacturing, good lubrication, and low wear and tear.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
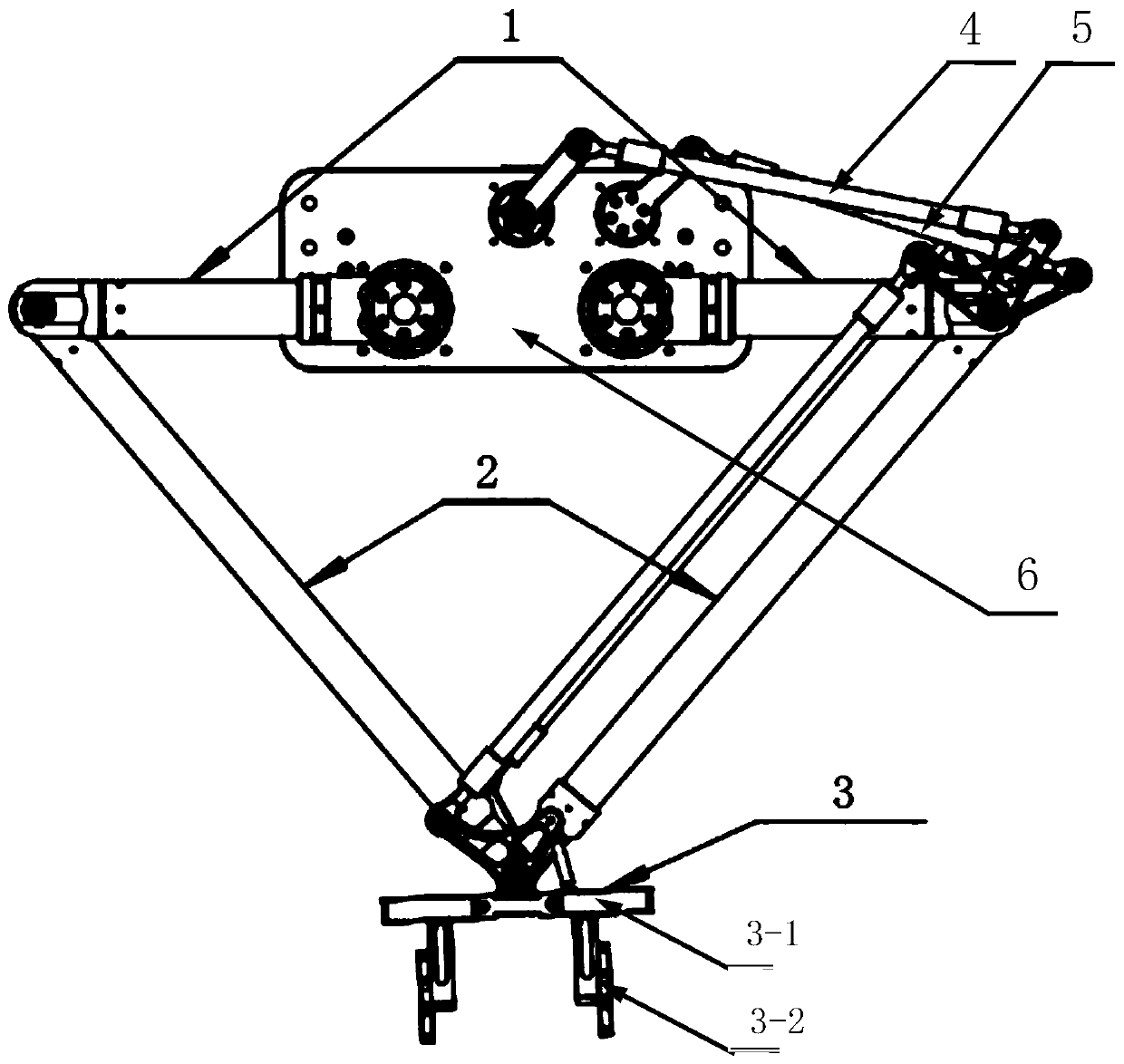
[0025] A two-axis parallel flipping and grabbing robot, such as Figure 1 to Figure 5 As shown, it includes a support base, a master arm, a slave arm, an end effector, a driving motor, a grabbing mechanism and a turning mechanism, and a pair of master arms are installed on the support base, and each master arm is connected to a slave arm, and the slave arm The lower end is jointly connected to the end effector, and the end effector includes a moving platform and jaws movably installed under the moving platform;
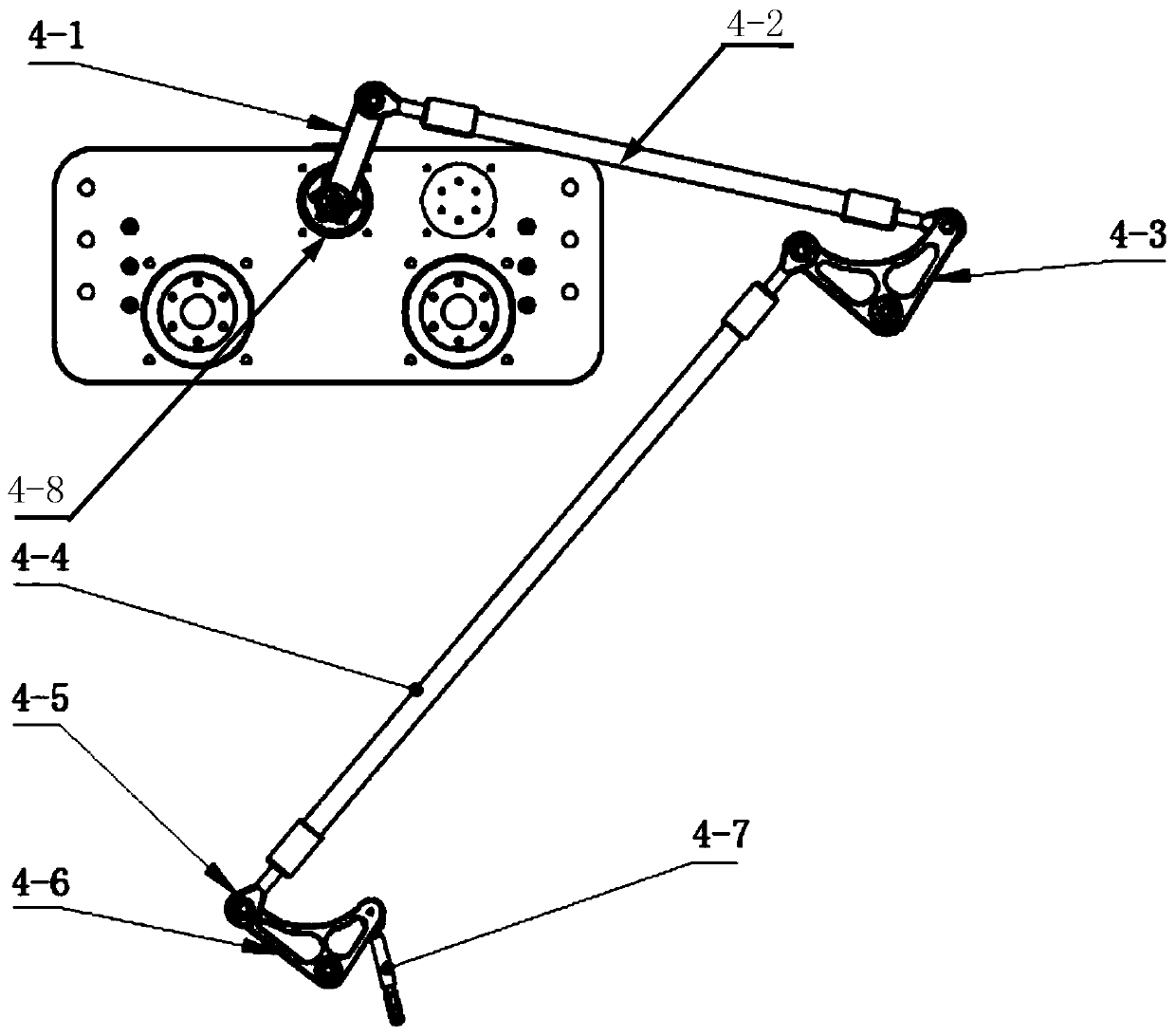
[0026] The two-axis parallel flip grabbing robot also includes a grabbing mechanism, which includes a grabbing motor, a grabbing link mechanism, and a grabbing link. The grabbing motor is installed on the support base, and the grabbing motor drives The driving end of the grasping link mechanism and the driven end of the grasping link mech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More