

Compensation test self-positioning bionic manipulator
A manipulator and self-positioning technology, used in manipulators, chucks, manufacturing tools, etc., can solve the problems of low rigidity, uneconomical, and long use time, and achieve the effect of improving work efficiency, not damaging materials, and grasping and kneading.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
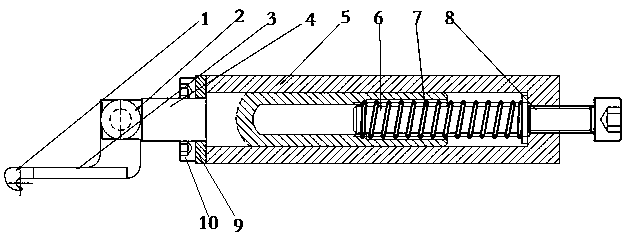
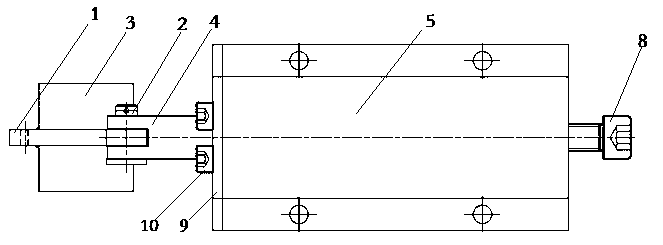
[0011] The present invention includes a mantis hand 1, a mantis arm 4 and a body 5. The front and rear sides of the body 5 are processed with circular through-holes, the periphery of the guide counterbore on the left end of the body 5 is processed with threaded counterbores, and the left end of the body 5 is guided to the bottom of the counterbore. There is a threaded hole connecting the right end face. The right arm body of Mantis Arm 4 is processed with a counterbore with steps. There is a circular through hole on the side of the groove of the head of the connecting rod on the left side of Mantis Arm 4. One end of Mantis Arm 1 is the one extending downward. Arc-shaped grab hook, the other end of the mantis 1 is a vertical rectangular steel plate processed with a circular through hole, the two sides of the mantis 1 are welded with a limit plate 3, and the counterbore of the steps is equipped with a compression spring 7 and a mandrel 6. Insert the body of the 4 arm into the gui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More