

Parameter tuning method for fractional-order PID controller
A parameter setting and controller technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve unfavorable practical applications, cannot guarantee system stability gain disturbance robustness, cannot guarantee the dynamic response performance of the control system, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
[0052] refer to figure 1 , the present application discloses a parameter tuning method of a fractional-order PID controller. The transfer function of the controlled object of the servo system targeted by the method is as follows, K, τ 1 and τ 2 All are object model parameters, and its first embodiment includes the following steps:
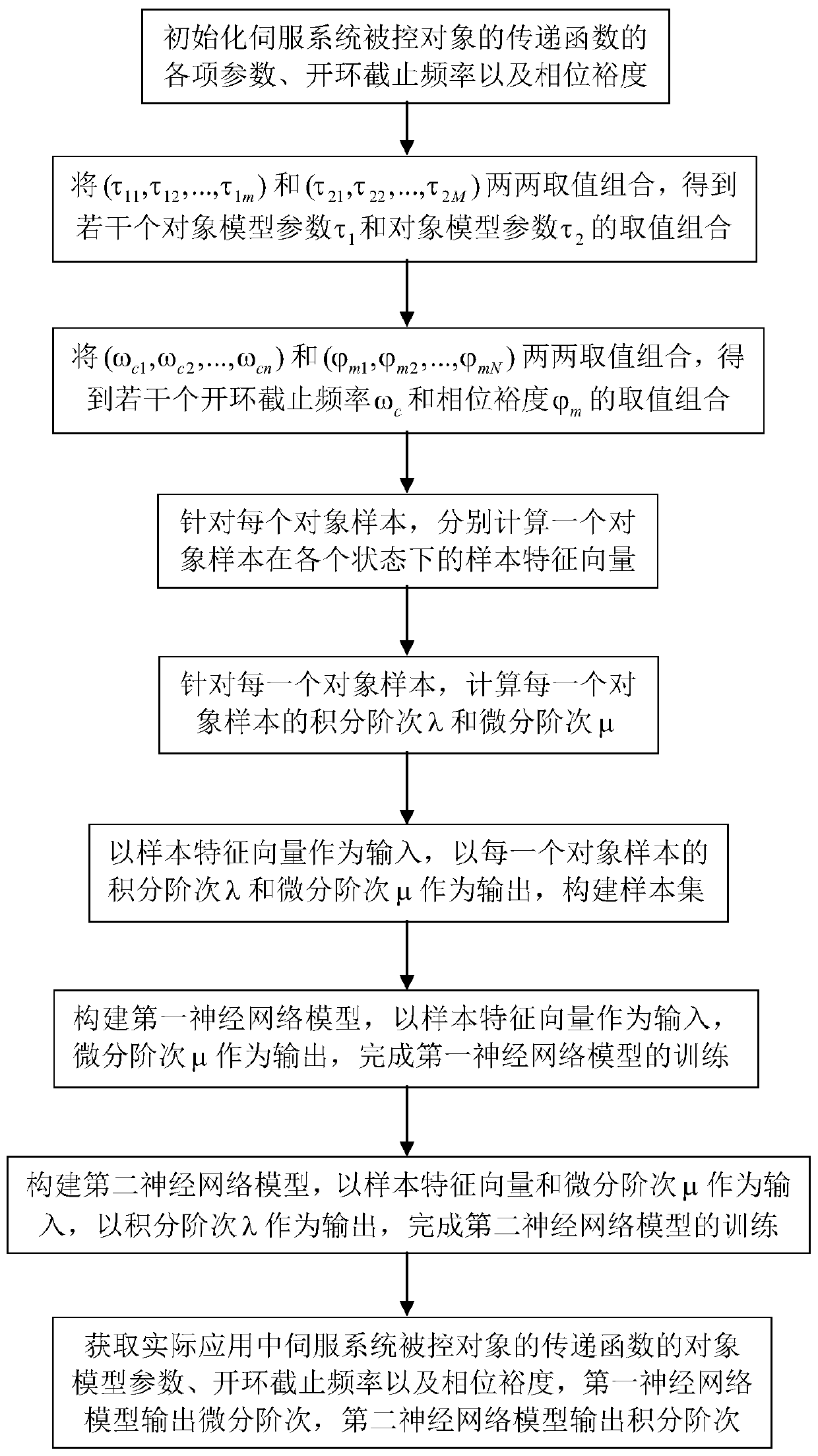
[0053] Based on the neural network model, calculate the integral order λ and differential order μ of the fractional order PID controller model;
[0054] Based on the acquired integral order λ and differential order μ of the fractional-order PID controller model, the proportional gain K of the fractional-order PID controller model is calculated using the horizontal phase criterion p , Integral gain K i and the differential gain K d . The so-called horizontal phase criterion means that at the open-loop cut-off frequency point, the sum of the phase derivative of the controlled object of the servo system and the phase derivative of the fractiona...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More