

Unmanned aerial vehicle track route planning method applied to community distribution
A path planning and unmanned aerial vehicle technology, applied in the general control system, three-dimensional position/course control, vehicle position/route/height control, etc., can solve problems such as not being smooth enough, the quality of the path result is not high, and far from the optimal path , to achieve high-quality results, optimal paths, and improved efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
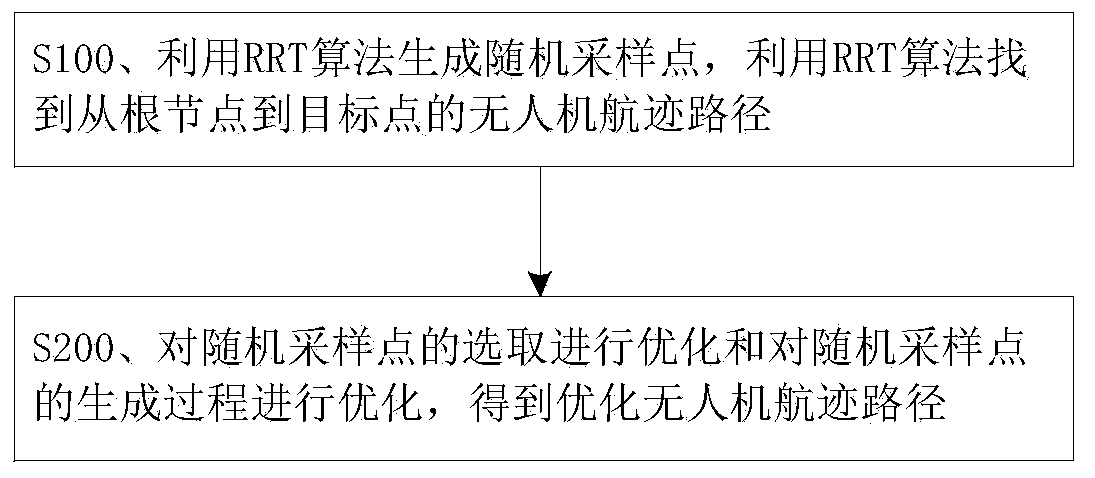
[0046] Such as figure 1 As shown, the UAV track path planning method for community distribution in this embodiment includes the following steps:
[0047] S100, using the RRT algorithm to generate a random sampling point t ran , use the RRT algorithm to find from the root node t ini to the target point t goa The trajectory path of the UAV;
[0048] S200, for random sampling point t ran The selection of is optimized and the random sampling point t ran The generation process is optimized, and the optimized UAV track path is obtained.
[0049] The above uses the RRT algorithm to find the root node t ini to the target point t goa The specific implementation steps of the planning path include the following:
[0050] S101. Determine the fixed point of the automatic unmanned cabinet supporting the drone as the random tree root node t ini , obtain the three-dimensional geographic location information of the fixed point of the automatic unmanned cabinet from the three-dimension...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More