

Vehicle positioning optimization method, device, equipment and storage medium
A technology of vehicle positioning and optimization method, applied in the field of data processing, can solve the problems that the positioning information cannot accurately control the driving of the vehicle, cannot meet the positioning requirements of automatic driving vehicles, and the positioning accuracy of the positioning system is low, so as to meet the positioning requirements, improve the accuracy, Solve for fast effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
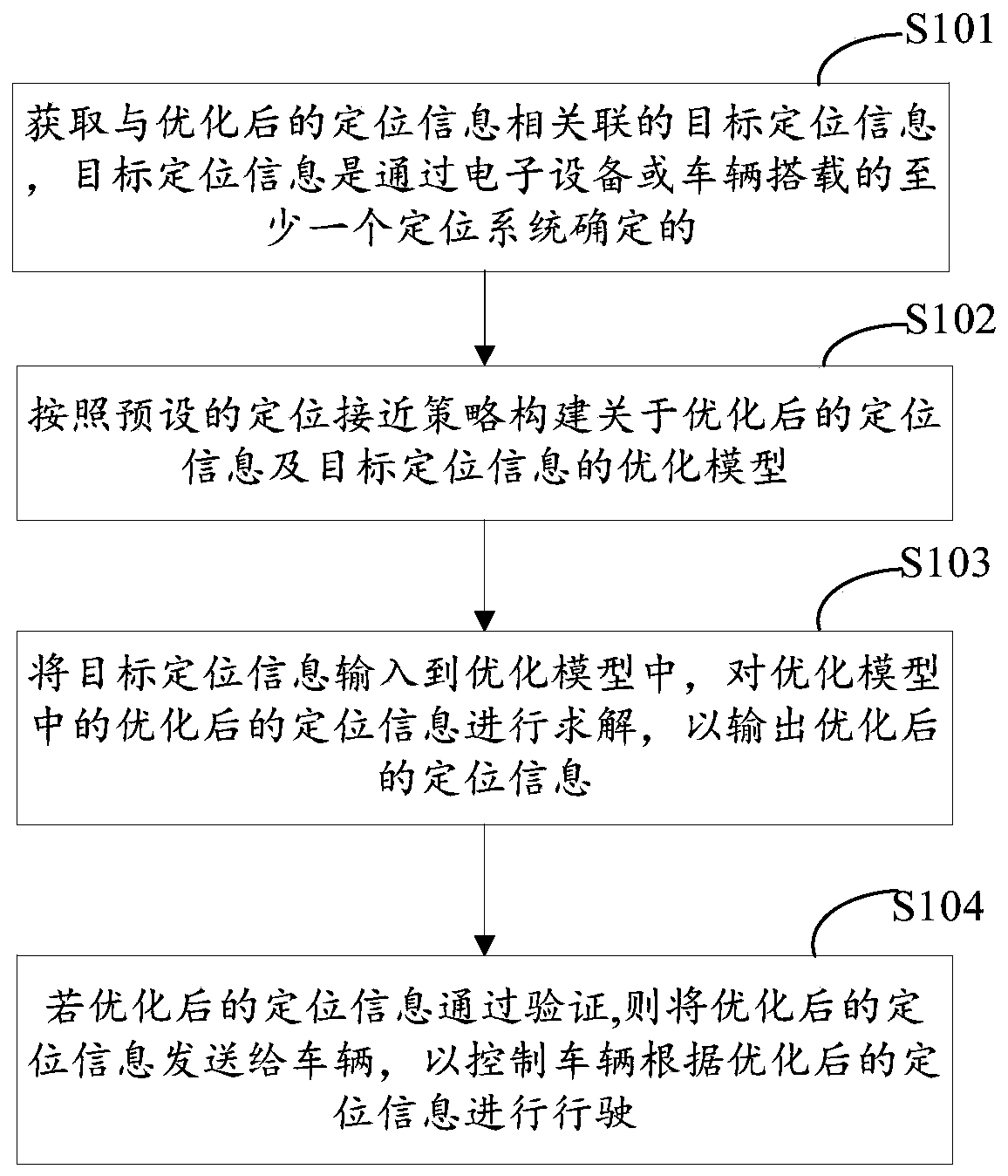
[0089] figure 2 is a schematic flowchart of an optimization method for vehicle positioning provided according to the first embodiment of the present application, as shown in figure 2 As shown, the execution subject of the embodiment of the present application is a vehicle positioning optimization apparatus, and the vehicle positioning optimization apparatus may be integrated into an electronic device. Then, the optimization method for vehicle positioning provided in this embodiment includes the following steps.
[0090] Step 101: Obtain target positioning information associated with the optimized positioning information, where the target positioning information is determined by at least one positioning system mounted on an electronic device or a vehicle.
[0091] In this embodiment, the target positioning information is the optimized positioning information. If the optimized positioning information is the optimized vehicle pose, the target positioning information may inclu...
Embodiment 2
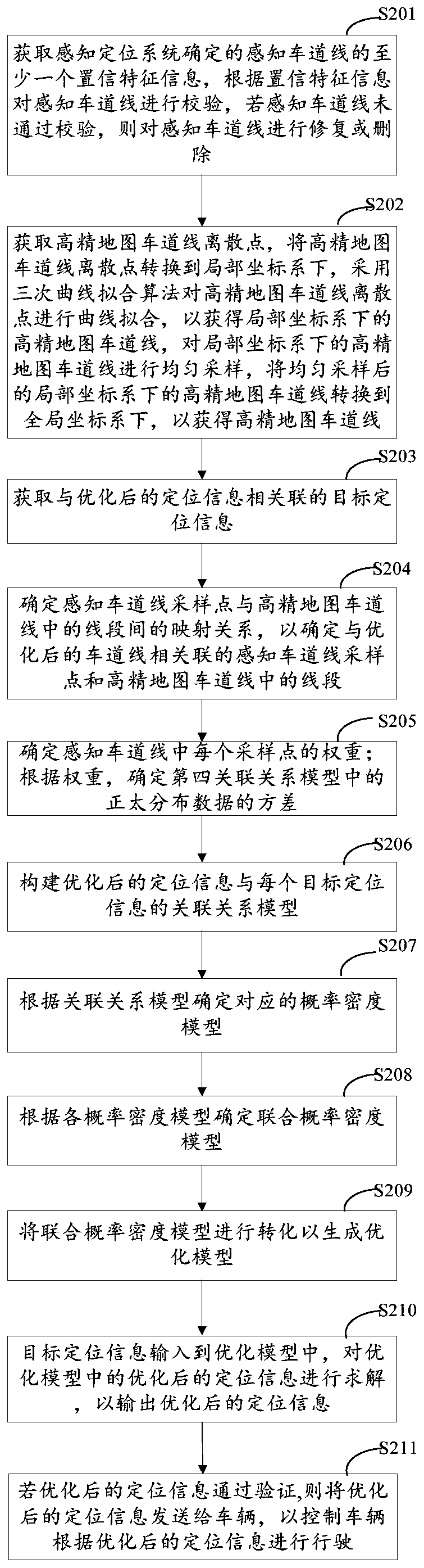
[0111] image 3 is a schematic flow chart of the vehicle positioning optimization method provided according to the second embodiment of the present application, as shown in image 3 As shown, the vehicle positioning optimization method provided in this embodiment is based on the vehicle positioning optimization method provided in Embodiment 1 of the present application, and further refines steps 101-104. And it also includes the step of verifying the perceived lane lines and the step of processing the high-precision map lane lines, so the vehicle positioning optimization method provided by this embodiment includes the following steps.
[0112] Step 201: Obtain at least one confidence characteristic information of the perceived lane line determined by the perception positioning system, verify the perceived lane line according to the confidence characteristic information, and repair or delete the perceived lane line if the perceived lane line fails the verification.
[0113] Fu...
Embodiment 3
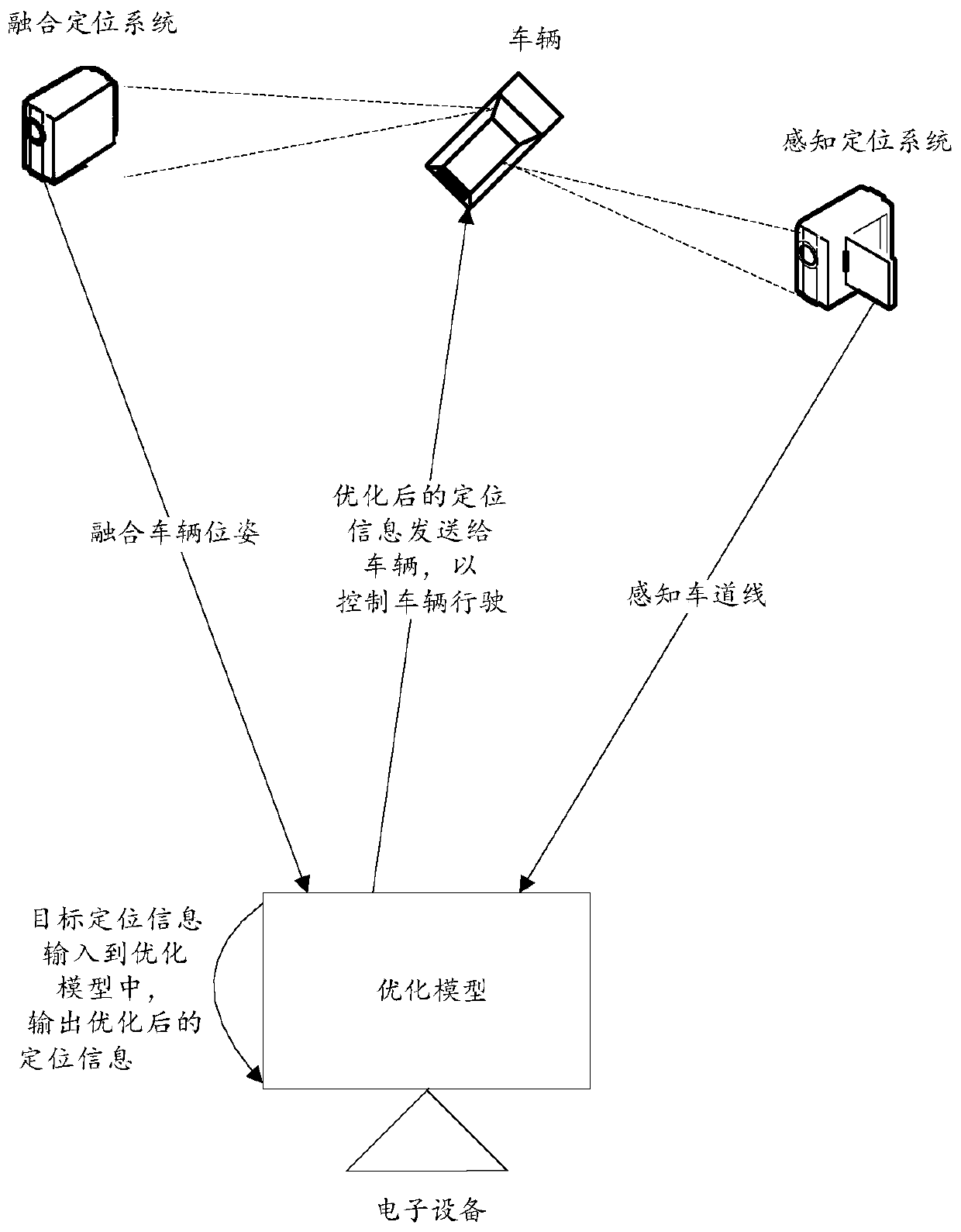
[0255] Figure 9 A schematic diagram of the signaling flow of the optimization method for vehicle positioning provided according to the third embodiment of the present application, such as Figure 9 As shown, the optimization method for vehicle positioning provided by this embodiment includes the following steps:
[0256] Step 301, the fusion positioning system obtains the fusion vehicle pose.
[0257] Step 302, the fusion positioning system sends the fusion vehicle pose to the electronic device
[0258] Step 303, the perception and positioning system acquires the perception lane line.
[0259] Step 304, the sensing and positioning system sends the sensing lane line to the electronic device.
[0260] Step 305, the electronic device obtains the lane lines of the high-precision map and the historically optimized vehicle pose, and obtains the fused vehicle pose associated with the optimized positioning information, perceives the lane lines, the lane lines of the high-precision...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More