

Lane line dynamic detection and lane boundary fitting method
A dynamic detection and lane line technology, applied in the field of parabolic-oriented lane line modeling, can solve the problems of poor robustness and a large number of manual parameter adjustments, and achieve the effect of high accuracy and good detection effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment
[0047] Embodiment: a lane line dynamic detection and lane boundary fitting method, which is suitable for lane line detection and lane line curve fitting in video image frames.
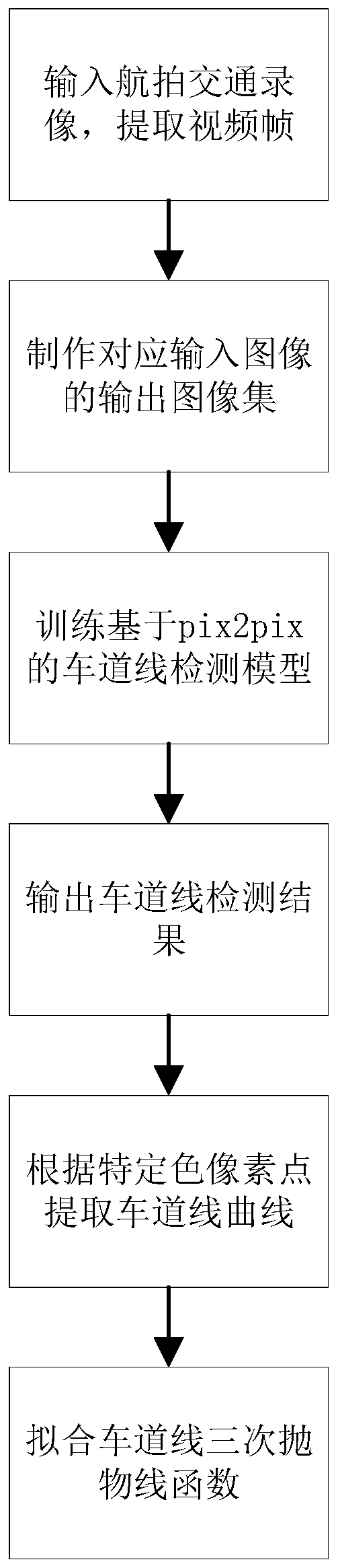
[0048] Such as figure 1 As shown, the specific process is:
[0049] S1. Extract the video frames of the road aerial photography video, select some video frames, use special colors to artificially draw the lane lines and the original video frames for these video frames as a training set for generating an adversarial network;
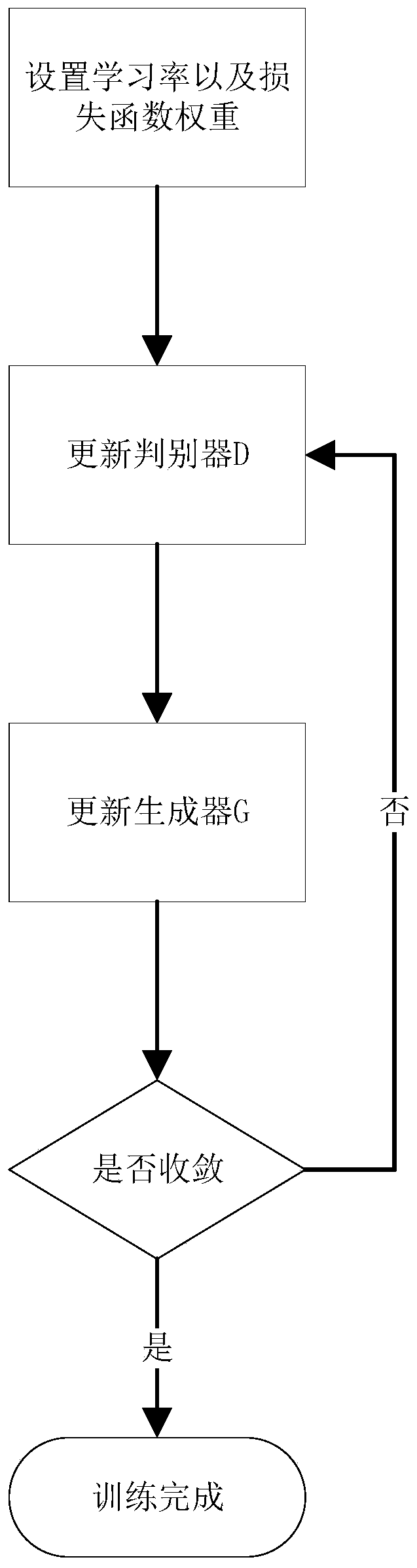
[0050]S2, using the image set obtained in step S1 to train the image-to-image translation model based on the generative confrontation network, to obtain the optimal experimental parameters of the model and the training parameters of the generator and the discriminator;
[0051] S3, use the picture-to-picture translation model detection test set obtained by training in step S2, that is, the lane line in the video frame of the unmarked lane line, output the detection result of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More