

MRAC control method of hydraulic servo system based on nonlinear neural network
A technology of hydraulic servo system and neural network, applied in the field of MRAC control of hydraulic servo system based on nonlinear neural network, can solve the problems of parameter uncertainty, matching and mismatching interference, achieve good tracking performance, and solve high-gain feedback Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
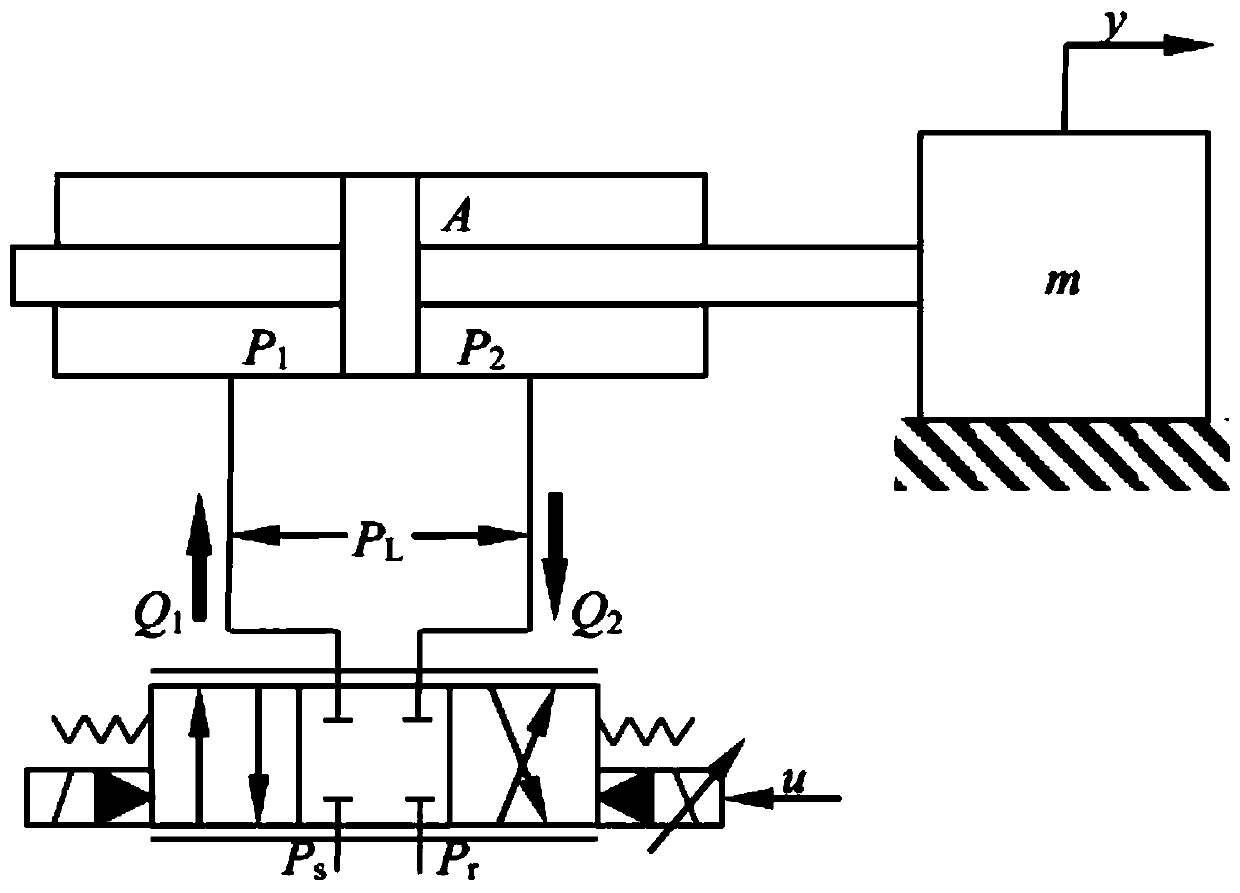
[0172] The servo valve is Moog G761-3003, the flow rate is 19L / min, the withstand pressure is 7MPa, the frequency range is 120Hz, and the stroke of the double-rod hydraulic chamber is ±44mm. The pressure sensor is MEASUS175-C00002-200BG with an accuracy of 1 Pa and a maximum load of 30 kg. The linear encoder is a Heidenhain LC483 with an accuracy class of micron. The measurement control system consists of display software and real-time control software. The A / D card is Advantech PCI-1716, the D / A card is Advantech PCI-1723, and the reverse card is Heidenhain IK-220. All cards are 16-bit. The sampling time is 0.5 milliseconds. Due to the control method based on model reference, we choose A m for: B m Choose as: Where τ = 0.001 is the time constant.
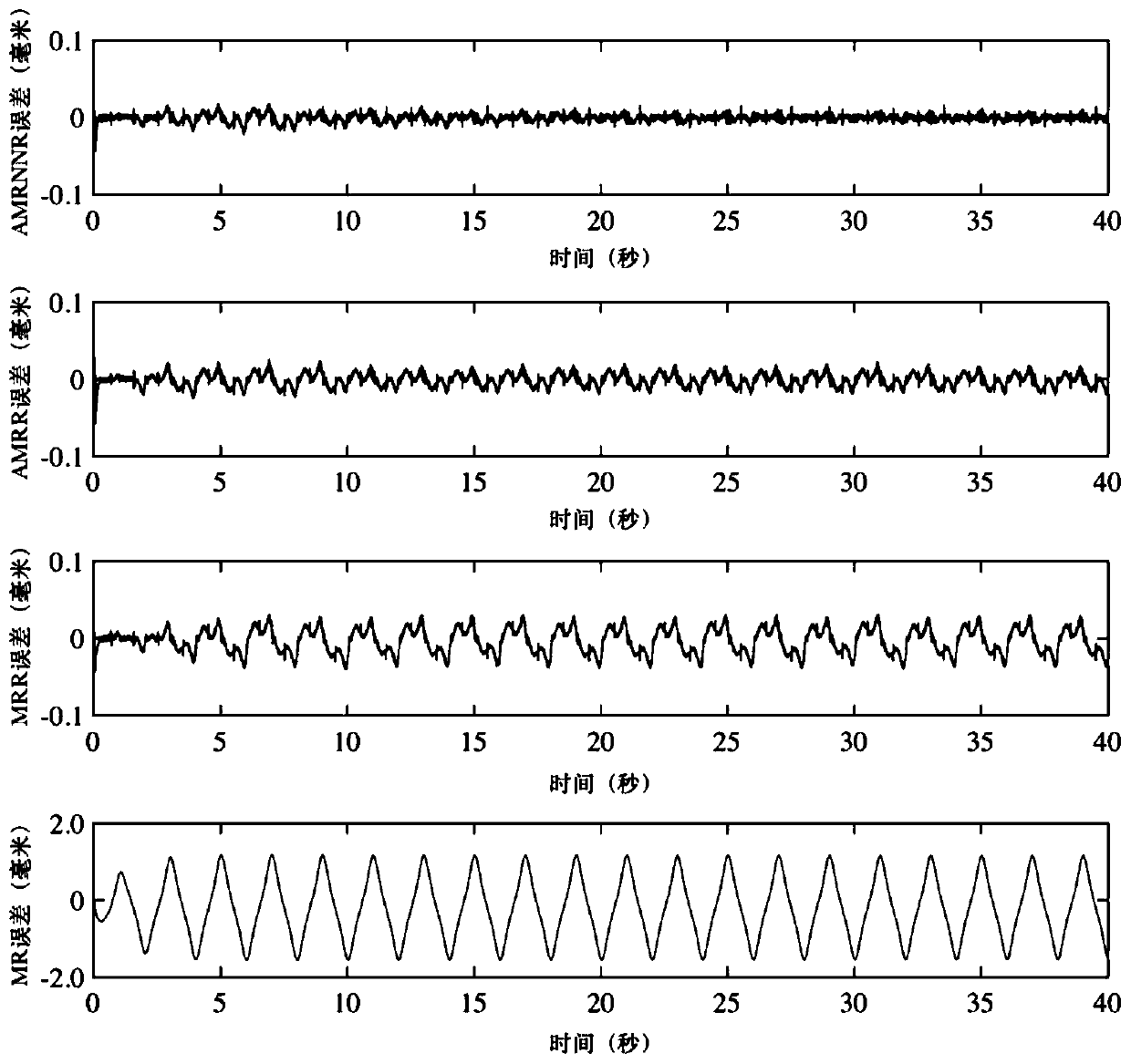
[0173] The following is a comparison of experimental results. In this embodiment, the following controllers are compared.
[0174] MRNNR: This is the controller designed in this paper. The parameters related to the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More