

Robust Integral Based Multilayer Neural Network Motor System Control Method
A multi-layer neural network and control method technology, applied in the field of motor servo control, can solve problems affecting system tracking performance and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0104] Motor position servo system parameters are inertial load parameters: m = 0.02kg; viscous friction coefficient B = 10N m s / °; torque amplification factor k i =6N / V; time-varying external interference
[0105] The position command that the system expects to track is as follows Figure 4 The curves of the sine command shown, the command speed and acceleration changing with time are also given together.
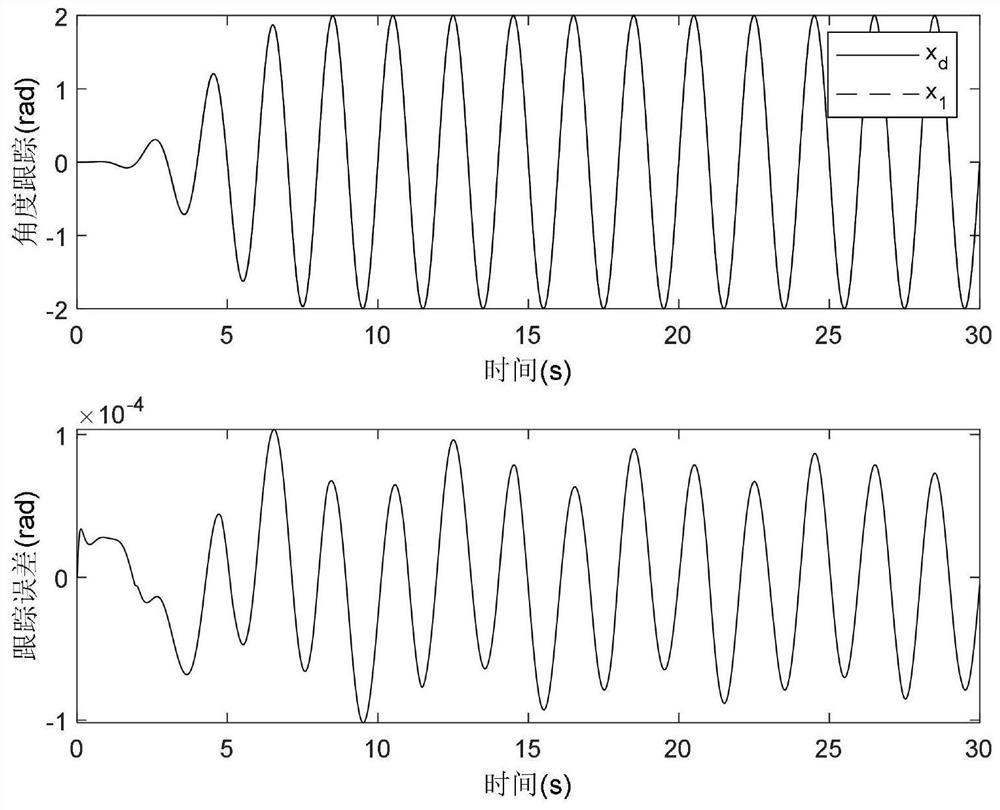
[0106] Comparison of simulation results: Robust integral-based multilayer neural network controller (NNRISE) parameter selection: k 1 =300;k 2 =100; β=60; PID controller parameter selection: k P =1699;k I = 13097; k D =0.
[0107] The selection steps of the PID controller parameters are as follows: First, under the condition of ignoring the nonlinear dynamics of the motor servo system, a set of controller parameters are obtained through the PID parameter self-tuning function in Matlab, and then after adding the nonlinear dynamics of the system Fine-tuning the obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More