

Method for self-adjustment error symbol integral robust control of electro-hydraulic torque servo system
A servo system and error symbol technology, which is applied in the field of self-adjusting error symbol integral robust control of electro-hydraulic torque servo system, and can solve the problems of controller discontinuity, model uncertainty, engineering limitations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0168]In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the electro-hydraulic torque servo system:
[0169] A=2×10 -4 m 3 / rad,V 01 =V 02 =1.7×10 -4 m 3 B=80N·m·s / rad,β e =2×10 8 Pa,C t =9×10 -12 m 5 / (N·s), P s =21×10 6 Pa, P r =0Pa, J=0.32kg·m 2 ,A f =80Nm,
[0170] The designed controller parameters are selected as: k 1 =900,k r =0.001, The self-regulating law gain Γ=5. The time-varying external disturbance of the system is selected as d=200sint, and the trajectory is The force command that the system expects to track is a curve
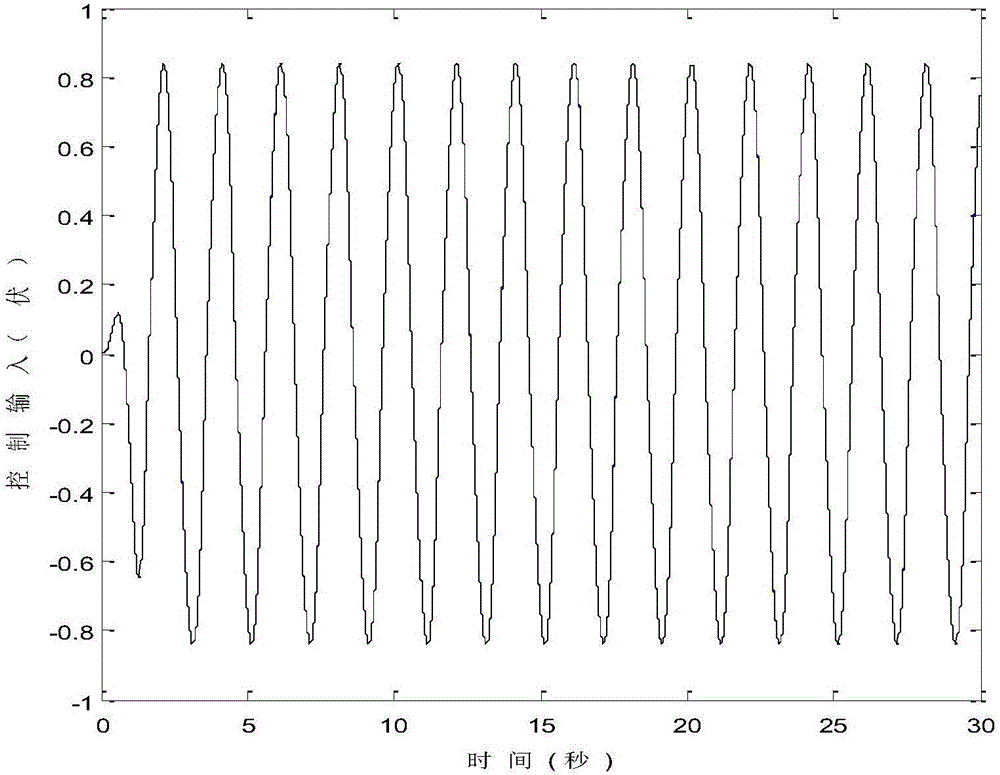
[0171] The effect of the control law:
[0172] image 3 It is a curve diagram of controller u changing with time in the embodiment, and the input voltage of the controller satisfies the input range of -10V~+10V, which is in line with practical application.
[0173] Figure 4 is the system disturbance as A plot of the estimated value of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More