

A cluster control method and system for multiple mobile robots
A mobile robot, control method technology, applied in general control system, control/regulation system, adaptive control and other directions, can solve the problem of limited driving capacity, difficulty in applying swarm control method to robot experimental device, difficult to meet steering speed and linear speed, etc. problem, to achieve the effect of fast search speed, suitable for application promotion, and avoid mutual collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
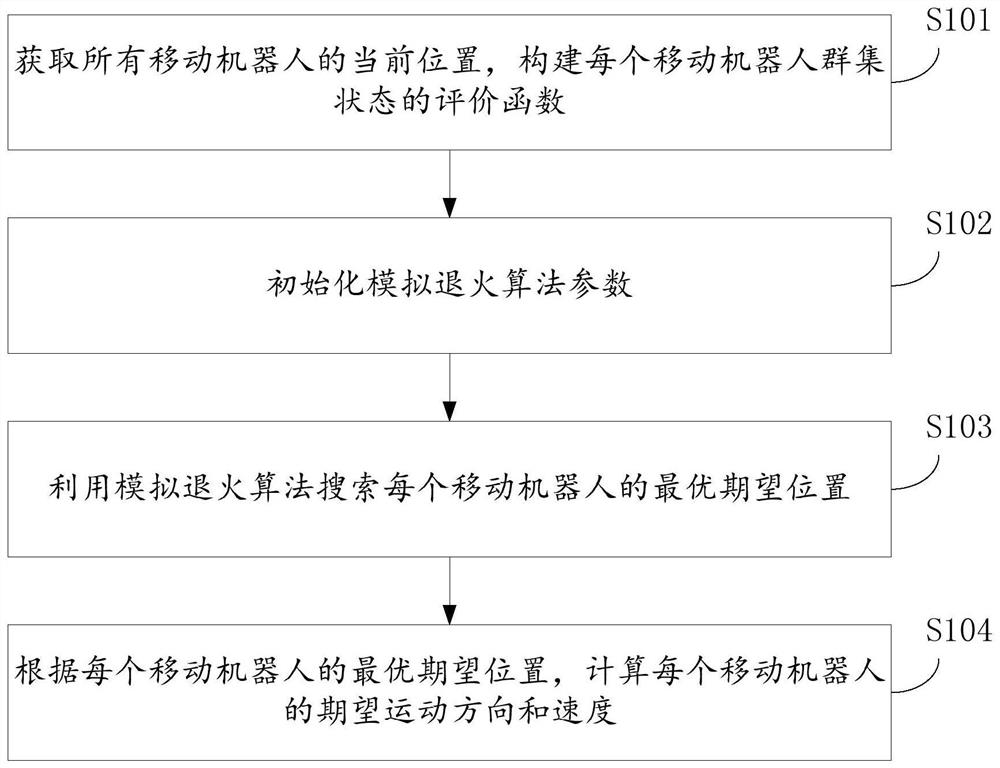
[0048] figure 1 It is the swarm control method of multiple mobile robots involved in this embodiment. Please refer to the attached figure 1 , the method includes the following steps:
[0049] S101. Obtain the current positions of all mobile robots, and construct an evaluation function of each mobile robot cluster state.
[0050] Specifically, the current position of the mobile robot is r i =[x i ,y i ] T ,i=1,2,…,n, where n is the total number of mobile robots participating in swarm control, x i and y i are the position coordinates of the mobile robot in the two-dimensional plane space coordinate system.
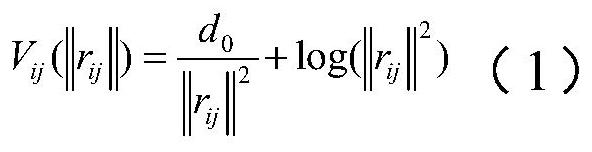
[0051] For the i-th mobile robot, construct the evaluation function V of its cluster state i . The specific construction method of the evaluation function of the i-th robot cluster state is:
[0052] The relative position between two adjacent mobile robots (i-th and j-th) can be expressed as r ij = r i -r j , the relative distance is ||r ij ||(|| || is a 2-type ...
Embodiment 2
[0107] This embodiment provides a cluster control system of multiple mobile robots, the system comprising:
[0108] The robot position acquisition module is used to obtain the current positions of all mobile robots, and constructs the evaluation function of each mobile robot cluster state;
[0109] The initialization module is used to initialize the parameters of the simulated annealing algorithm;
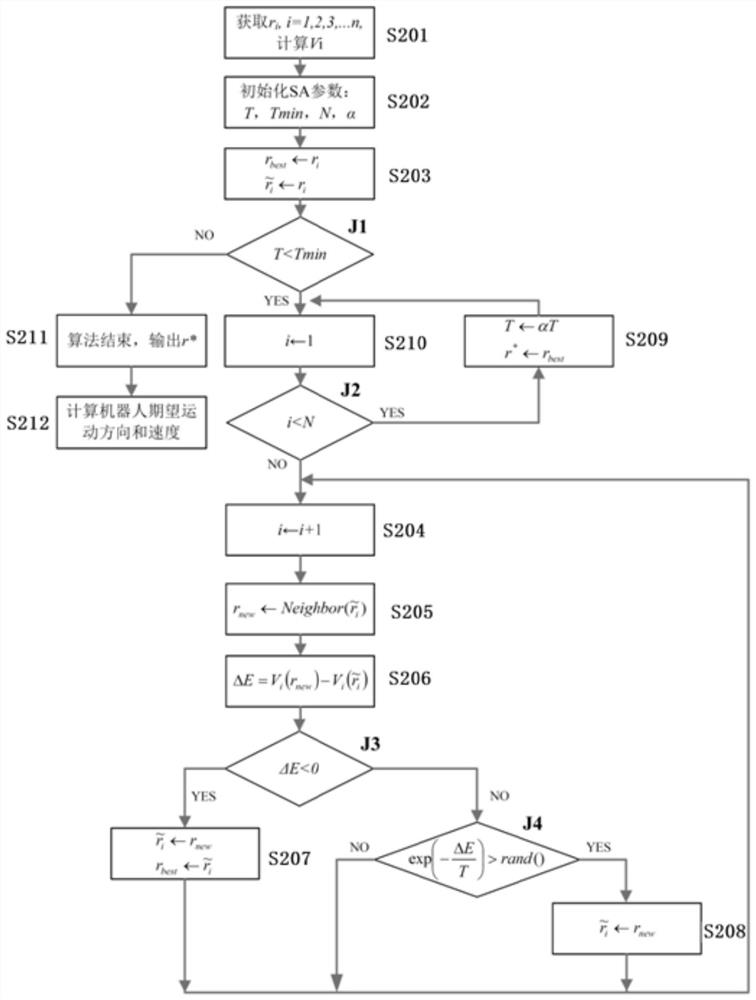
[0110] An optimal expected position search module is used to search for the optimal expected position of each mobile robot using a simulated annealing algorithm;
[0111] The motion control module is used to calculate the expected motion direction and speed of each mobile robot according to the optimal expected position of each mobile robot.
[0112] Specifically, the method for constructing the evaluation function of the mobile robot cluster state by the robot position acquisition module is:
[0113] According to the current position of any two adjacent mobile robots, calculate ...
Embodiment 3
[0138] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following steps are implemented:
[0139] Obtain the current positions of all mobile robots and construct an evaluation function for each mobile robot cluster state;
[0140] Initialize the simulated annealing algorithm parameters;
[0141] Use the simulated annealing algorithm to search for the optimal desired position of each mobile robot;
[0142] According to the optimal expected position of each mobile robot, the expected motion direction and speed of each mobile robot are calculated.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More