

Unmanned ship trajectory tracking safety control method based on slew rate constraint
A technology of trajectory tracking and safety control, applied in the control field of safe navigation of unmanned boats, can solve the problems of cumbersome calculation, few quantitative control methods, and difficult application in practical engineering, so as to avoid complex derivation and prevent the turning angular velocity from being too large. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following examples describe the present invention in more detail.
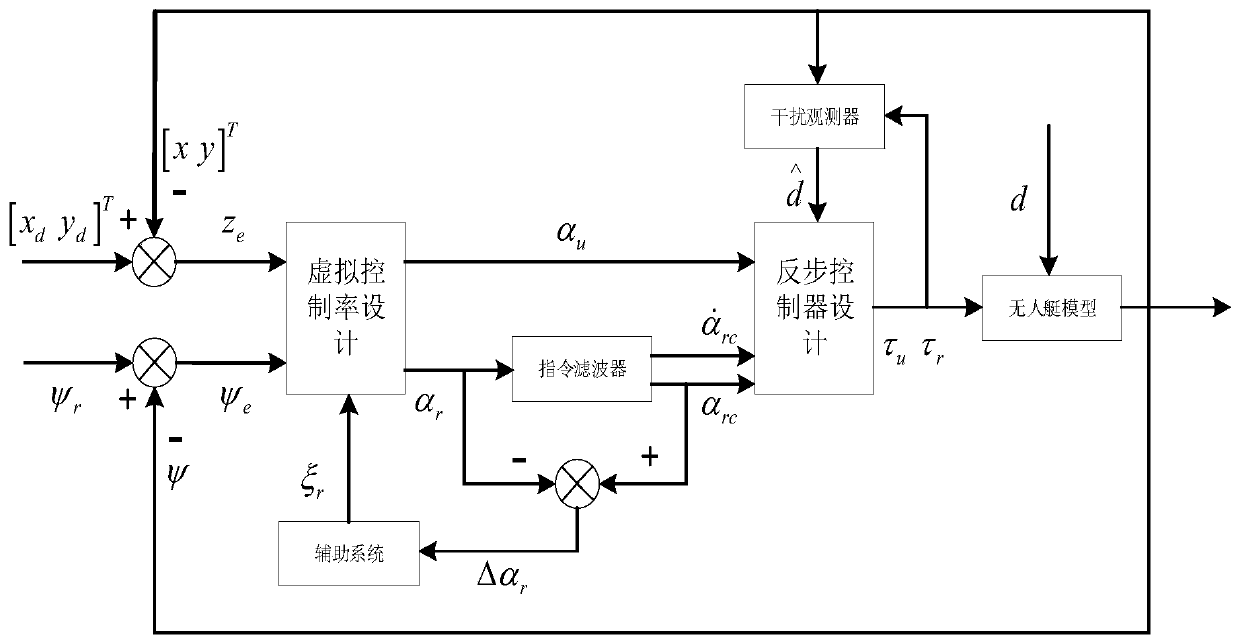
[0052] combine figure 1 , the specific steps of the trajectory tracking safety control method for unmanned boats based on slew rate constraints are as follows:
[0053] Step 1: Set the initial pose of the unmanned vehicle to η=[-300], the initial velocity to υ=[200], and set the desired trajectory to:
[0054]
[0055] where x d ,y d ,ψ d ,u d ,r d Denote the desired longitudinal position, desired lateral position, desired heading angle, desired longitudinal velocity and desired heading angular velocity, respectively; represent x respectively d ,y d ,ψ d first derivative with respect to time;
[0056] Set desired longitudinal velocity to u d =10, set the desired heading angular velocity as:
[0057]
[0058] Among them, t represents the simulation time;
[0059] Set the external disturbance as:
[0060]
[0061] Among them, τ wu ,τ wv ,τ wr Respectively represent the exter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More